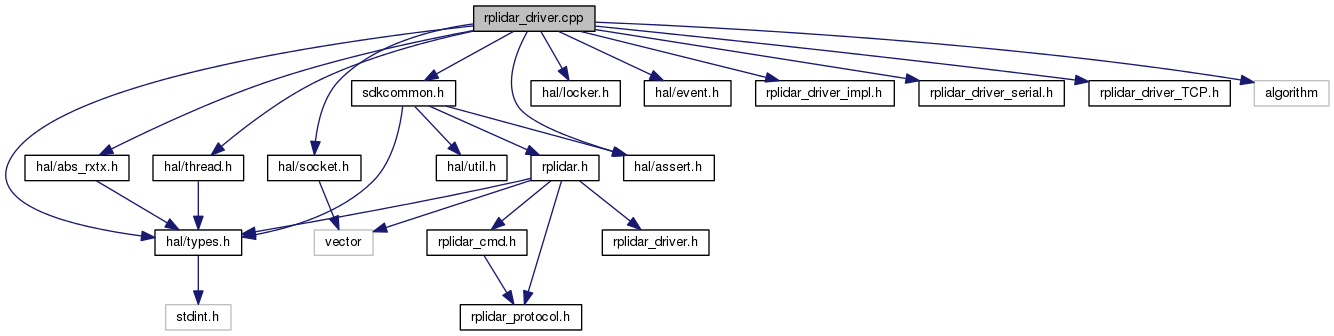
Go to the source code of this file.
Namespaces |
| namespace | rp |
| namespace | rp::standalone |
| namespace | rp::standalone::rplidar |
Defines |
| #define | DEPRECATED_WARN(fn, replacement) |
| #define | min(a, b) (((a) < (b)) ? (a) : (b)) |
Functions |
| static _u32 | rp::standalone::rplidar::_bitrev (_u32 input, _u16 bw) |
| static u_result | rp::standalone::rplidar::_crc32 (_u8 *ptr, _u32 len) |
| static void | rp::standalone::rplidar::_crc32_init (_u32 poly) |
| static _u32 | rp::standalone::rplidar::_crc32cal (_u32 crc, void *input, _u16 len) |
| static _u32 | rp::standalone::rplidar::_varbitscale_decode (_u32 scaled, _u32 &scaleLevel) |
| template<class TNode > |
| static bool | rp::standalone::rplidar::angleLessThan (const TNode &a, const TNode &b) |
| template<class TNode > |
| static u_result | rp::standalone::rplidar::ascendScanData_ (TNode *nodebuffer, size_t count) |
| static void | rp::standalone::rplidar::convert (const rplidar_response_measurement_node_t &from, rplidar_response_measurement_node_hq_t &to) |
| static void | rp::standalone::rplidar::convert (const rplidar_response_measurement_node_hq_t &from, rplidar_response_measurement_node_t &to) |
| static float | rp::standalone::rplidar::getAngle (const rplidar_response_measurement_node_t &node) |
| static float | rp::standalone::rplidar::getAngle (const rplidar_response_measurement_node_hq_t &node) |
| static _u16 | rp::standalone::rplidar::getDistanceQ2 (const rplidar_response_measurement_node_t &node) |
| static _u32 | rp::standalone::rplidar::getDistanceQ2 (const rplidar_response_measurement_node_hq_t &node) |
| static void | rp::standalone::rplidar::printDeprecationWarn (const char *fn, const char *replacement) |
| static void | rp::standalone::rplidar::setAngle (rplidar_response_measurement_node_t &node, float v) |
| static void | rp::standalone::rplidar::setAngle (rplidar_response_measurement_node_hq_t &node, float v) |
Variables |
| static _u32 | rp::standalone::rplidar::table [256] |
Define Documentation
Value:do { \
static bool __shown__ = false; \
if (!__shown__) { \
printDeprecationWarn(fn, replacement); \
__shown__ = true; \
} \
} while (0)
Definition at line 56 of file rplidar_driver.cpp.
| #define min |
( |
|
a, |
|
|
|
b |
|
) |
| (((a) < (b)) ? (a) : (b)) |