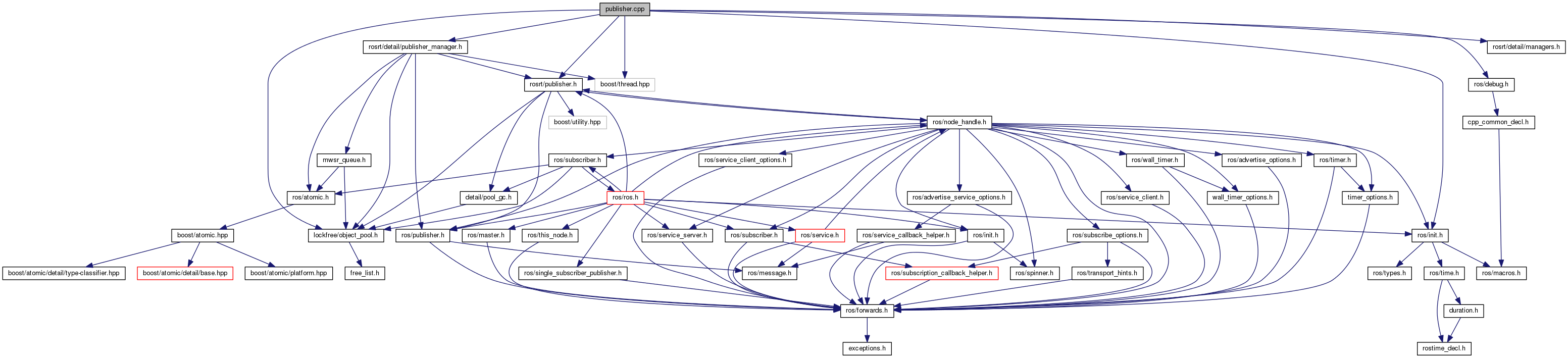
#include <rosrt/publisher.h>#include <rosrt/detail/publisher_manager.h>#include <rosrt/detail/managers.h>#include <rosrt/init.h>#include <ros/debug.h>#include <lockfree/object_pool.h>#include "boost/thread.hpp"
Include dependency graph for publisher.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | rosrt |
| namespace | rosrt::detail |
Functions | |
| bool | rosrt::detail::publish (const ros::Publisher &pub, const VoidConstPtr &msg, PublishFunc pub_func, CloneFunc clone_func) |