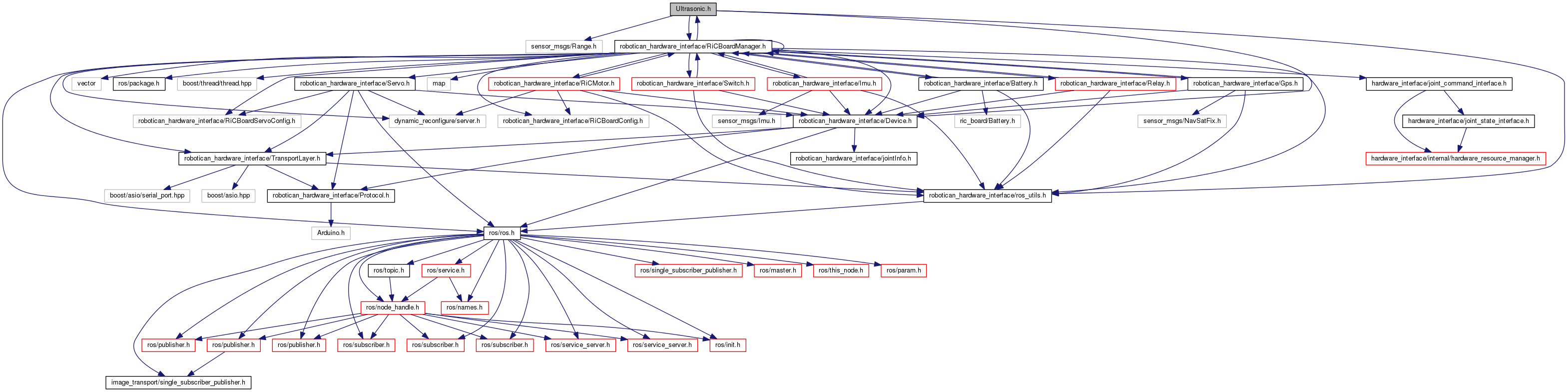
#include <sensor_msgs/Range.h>#include <robotican_hardware_interface/Device.h>#include <robotican_hardware_interface/ros_utils.h>#include <robotican_hardware_interface/RiCBoardManager.h>
Include dependency graph for Ultrasonic.h:
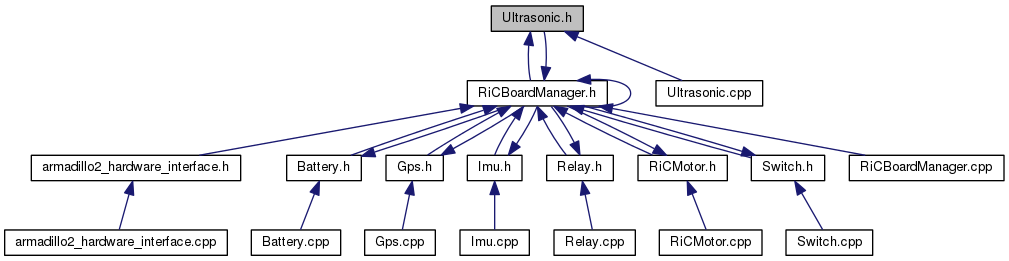
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | robotican_hardware::Ultrasonic |
Namespaces | |
| namespace | robotican_hardware |
Defines | |
| #define | FIELD_OF_VIEW_URF_HRLV_MaxSonar 0.7f |
| #define | FIELD_OF_VIEW_URF_LV_MaxSonar 0.7f |
| #define | MAX_RANGE_URF_HRLV_MaxSonar 5.0f |
| #define | MAX_RANGE_URF_LV_MaxSonar 6.45f |
| #define | MIN_RANGE_URF_HRLV_MaxSonar 0.3f |
| #define | MIN_RANGE_URF_LV_MaxSonar 0.16f |
| #define | URF_HRLV_MaxSonar_an2m 5.0/ 1000.0 |
| #define | URF_LV_MaxSonar_an2m 13004.8/65535.0/1000.0 |
Define Documentation
| #define FIELD_OF_VIEW_URF_HRLV_MaxSonar 0.7f |
Definition at line 16 of file Ultrasonic.h.
| #define FIELD_OF_VIEW_URF_LV_MaxSonar 0.7f |
Definition at line 21 of file Ultrasonic.h.
| #define MAX_RANGE_URF_HRLV_MaxSonar 5.0f |
Definition at line 15 of file Ultrasonic.h.
| #define MAX_RANGE_URF_LV_MaxSonar 6.45f |
Definition at line 20 of file Ultrasonic.h.
| #define MIN_RANGE_URF_HRLV_MaxSonar 0.3f |
Definition at line 14 of file Ultrasonic.h.
| #define MIN_RANGE_URF_LV_MaxSonar 0.16f |
Definition at line 19 of file Ultrasonic.h.
| #define URF_HRLV_MaxSonar_an2m 5.0/ 1000.0 |
Definition at line 13 of file Ultrasonic.h.
| #define URF_LV_MaxSonar_an2m 13004.8/65535.0/1000.0 |
Definition at line 18 of file Ultrasonic.h.