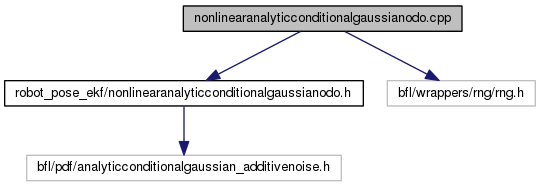
#include <robot_pose_ekf/nonlinearanalyticconditionalgaussianodo.h>#include <bfl/wrappers/rng/rng.h>
Include dependency graph for nonlinearanalyticconditionalgaussianodo.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | BFL |
Defines | |
| #define | NUMCONDARGUMENTS_MOBILE 2 |
Define Documentation
| #define NUMCONDARGUMENTS_MOBILE 2 |
Definition at line 20 of file nonlinearanalyticconditionalgaussianodo.cpp.