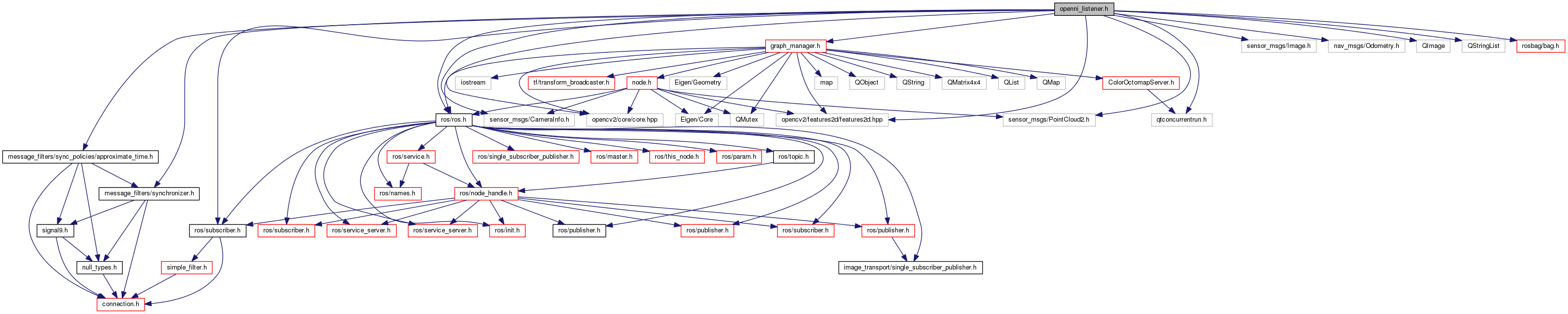
#include "ros/ros.h"#include <message_filters/subscriber.h>#include <message_filters/synchronizer.h>#include <message_filters/sync_policies/approximate_time.h>#include <sensor_msgs/Image.h>#include <sensor_msgs/CameraInfo.h>#include <sensor_msgs/PointCloud2.h>#include <nav_msgs/Odometry.h>#include <opencv2/core/core.hpp>#include <opencv2/features2d/features2d.hpp>#include "graph_manager.h"#include <qtconcurrentrun.h>#include <QImage>#include <QStringList>#include <rosbag/bag.h>
Include dependency graph for openni_listener.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | BagSubscriber< M > |
| class | OpenNIListener |
| Handles most of the ROS-based communication. More... | |
Typedefs | |
| typedef message_filters::sync_policies::ApproximateTime < sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::PointCloud2 > | KinectSyncPolicy |
| typedef message_filters::sync_policies::ApproximateTime < sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::CameraInfo > | NoCloudSyncPolicy |
| typedef message_filters::sync_policies::ApproximateTime < sensor_msgs::Image, sensor_msgs::PointCloud2 > | StereoSyncPolicy |
Typedef Documentation
| typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::PointCloud2> KinectSyncPolicy |
Definition at line 47 of file openni_listener.h.
| typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::Image, sensor_msgs::CameraInfo> NoCloudSyncPolicy |
Definition at line 55 of file openni_listener.h.
| typedef message_filters::sync_policies::ApproximateTime<sensor_msgs::Image, sensor_msgs::PointCloud2> StereoSyncPolicy |
Definition at line 50 of file openni_listener.h.