#include <OPC_PlanesCollider.h>
Detailed Description
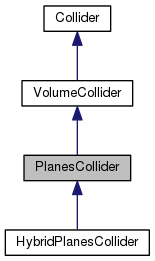
Contains a Planes-vs-tree collider.
- Version:
- 1.3
- Date:
- January, 1st, 2002
Definition at line 30 of file OPC_PlanesCollider.h.
Constructor & Destructor Documentation
| virtual PlanesCollider::~PlanesCollider | ( | ) | [virtual] |
Member Function Documentation
| void PlanesCollider::_Collide | ( | const AABBCollisionNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_Collide | ( | const AABBNoLeafNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_Collide | ( | const AABBQuantizedNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_Collide | ( | const AABBQuantizedNoLeafNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_CollideNoPrimitiveTest | ( | const AABBCollisionNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_CollideNoPrimitiveTest | ( | const AABBNoLeafNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_CollideNoPrimitiveTest | ( | const AABBQuantizedNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| void PlanesCollider::_CollideNoPrimitiveTest | ( | const AABBQuantizedNoLeafNode * | node, |
| udword | clip_mask | ||
| ) | [protected] |
| bool PlanesCollider::Collide | ( | PlanesCache & | cache, |
| const Plane * | planes, | ||
| udword | nb_planes, | ||
| const Model & | model, | ||
| const Matrix4x4 * | worldm = null |
||
| ) |
Generic collision query for generic OPCODE models. After the call, access the results:
- with GetContactStatus()
- with GetNbTouchedPrimitives()
- with GetTouchedPrimitives()
- Parameters:
-
cache [in/out] a planes cache planes [in] list of planes in world space nb_planes [in] number of planes model [in] Opcode model to collide with worldm [in] model's world matrix, or null
- Returns:
- true if success
- Warning:
- SCALE NOT SUPPORTED. The matrices must contain rotation & translation parts only.
| inline_ bool PlanesCollider::Collide | ( | PlanesCache & | cache, |
| const OBB & | box, | ||
| const Model & | model, | ||
| const Matrix4x4 * | worldb = null, |
||
| const Matrix4x4 * | worldm = null |
||
| ) | [inline] |
Definition at line 59 of file OPC_PlanesCollider.h.
| BOOL PlanesCollider::InitQuery | ( | PlanesCache & | cache, |
| const Plane * | planes, | ||
| udword | nb_planes, | ||
| const Matrix4x4 * | worldm = null |
||
| ) | [protected] |
| PlanesCollider::override | ( | Collider | ) | const |
Validates current settings. You should call this method after all the settings and callbacks have been defined for a collider.
- Returns:
- null if everything is ok, else a string describing the problem
Reimplemented from VolumeCollider.
| inline_ BOOL PlanesCollider::PlanesAABBOverlap | ( | const Point & | center, |
| const Point & | extents, | ||
| udword & | out_clip_mask, | ||
| udword | in_clip_mask | ||
| ) | [protected] |
Planes-AABB overlap test.
- original code by Ville Miettinen, from Umbra/dPVS (released on the GD-Algorithms mailing list)
- almost used "as-is", I even left the comments (hence the frustum-related notes)
- Parameters:
-
center [in] box center extents [in] box extents out_clip_mask [out] bitmask for active planes in_clip_mask [in] bitmask for active planes
- Returns:
- TRUE if boxes overlap planes
Definition at line 14 of file OPC_PlanesAABBOverlap.h.
| inline_ BOOL PlanesCollider::PlanesTriOverlap | ( | udword | in_clip_mask | ) | [protected] |
Planes-triangle overlap test.
- Parameters:
-
in_clip_mask [in] bitmask for active planes
- Returns:
- TRUE if triangle overlap planes
- Warning:
- THIS IS A CONSERVATIVE TEST !! Some triangles will be returned as intersecting, while they're not!
Definition at line 11 of file OPC_PlanesTriOverlap.h.
| void PlanesCollider::setCollisionPairInserter | ( | hrp::CollisionPairInserterBase * | collisionPairInserter | ) | [inline] |
Definition at line 37 of file OPC_PlanesCollider.h.
Member Data Documentation
Definition at line 91 of file OPC_PlanesCollider.h.
udword PlanesCollider::mNbPlanes [protected] |
Definition at line 93 of file OPC_PlanesCollider.h.
Plane* PlanesCollider::mPlanes [protected] |
Definition at line 94 of file OPC_PlanesCollider.h.
VertexPointers PlanesCollider::mVP [protected] |
Definition at line 96 of file OPC_PlanesCollider.h.
The documentation for this class was generated from the following files: