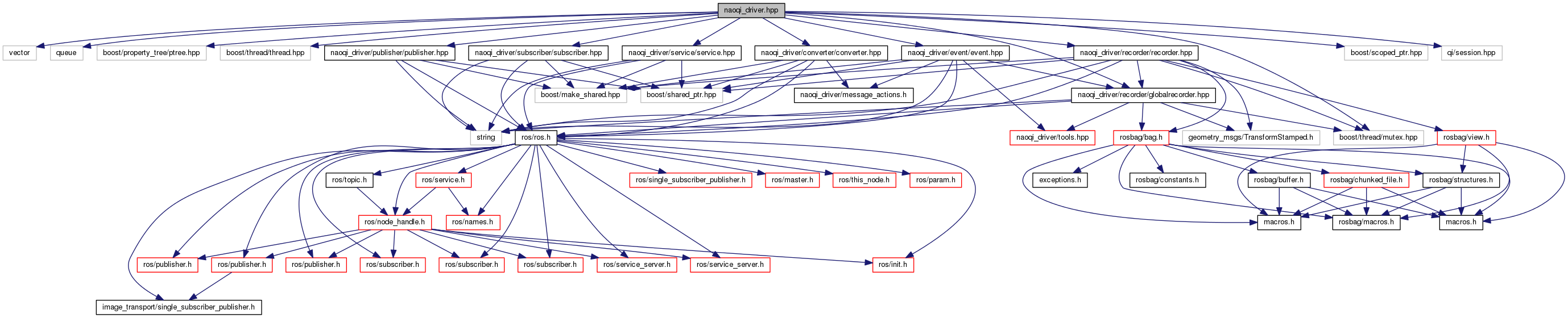
#include <vector>#include <queue>#include <boost/property_tree/ptree.hpp>#include <boost/thread/thread.hpp>#include <boost/thread/mutex.hpp>#include <boost/scoped_ptr.hpp>#include <qi/session.hpp>#include <naoqi_driver/converter/converter.hpp>#include <naoqi_driver/publisher/publisher.hpp>#include <naoqi_driver/subscriber/subscriber.hpp>#include <naoqi_driver/service/service.hpp>#include <naoqi_driver/recorder/recorder.hpp>#include <naoqi_driver/event/event.hpp>#include <naoqi_driver/recorder/globalrecorder.hpp>
Include dependency graph for naoqi_driver.hpp:
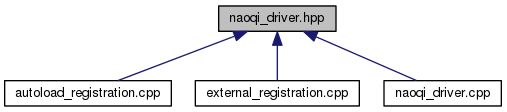
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | naoqi::Driver |
| Interface for naoqi driver which is registered as a naoqi2 Module, once the external roscore ip is set, this class will advertise and publish ros messages. More... | |
| struct | naoqi::Driver::ScheduledConverter |
Namespaces | |
| namespace | naoqi |
| namespace | naoqi::recorder |
| namespace | tf2_ros |