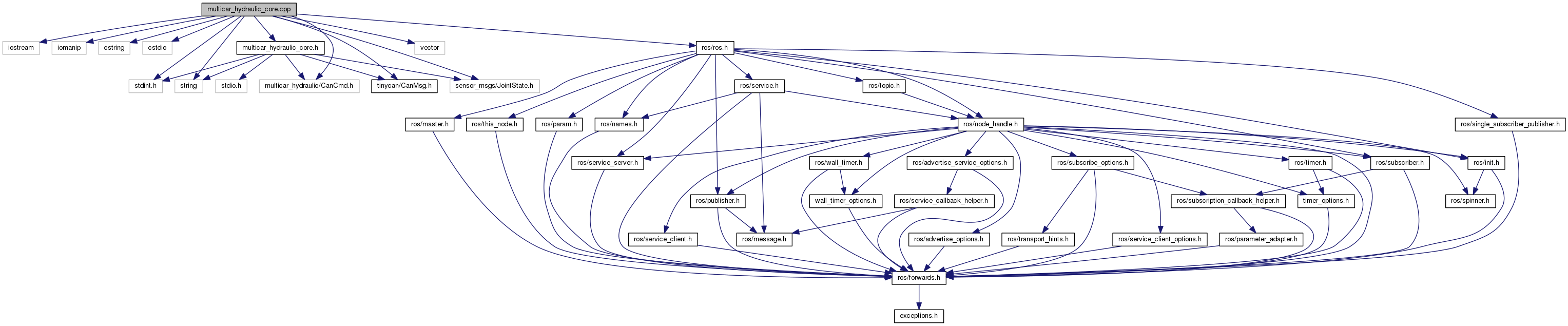
#include <iostream>#include <iomanip>#include <cstring>#include <cstdio>#include <stdint.h>#include <string>#include <vector>#include "ros/ros.h"#include "multicar_hydraulic_core.h"#include "multicar_hydraulic/CanCmd.h"#include "tinycan/CanMsg.h"#include "sensor_msgs/JointState.h"
Include dependency graph for multicar_hydraulic_core.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | hydraulic |
Defines | |
| #define | ALLOW_SF false |
| #define | ALLOW_SWK true |
| #define | DEBUG_CAN_OUTPUT true |
Functions | |
| bool | hydraulic::isBetween (uint32_t num, uint32_t lower, uint32_t upper) |
Define Documentation
| #define ALLOW_SF false |
Definition at line 16 of file multicar_hydraulic_core.cpp.
| #define ALLOW_SWK true |
Definition at line 15 of file multicar_hydraulic_core.cpp.
| #define DEBUG_CAN_OUTPUT true |
Definition at line 14 of file multicar_hydraulic_core.cpp.