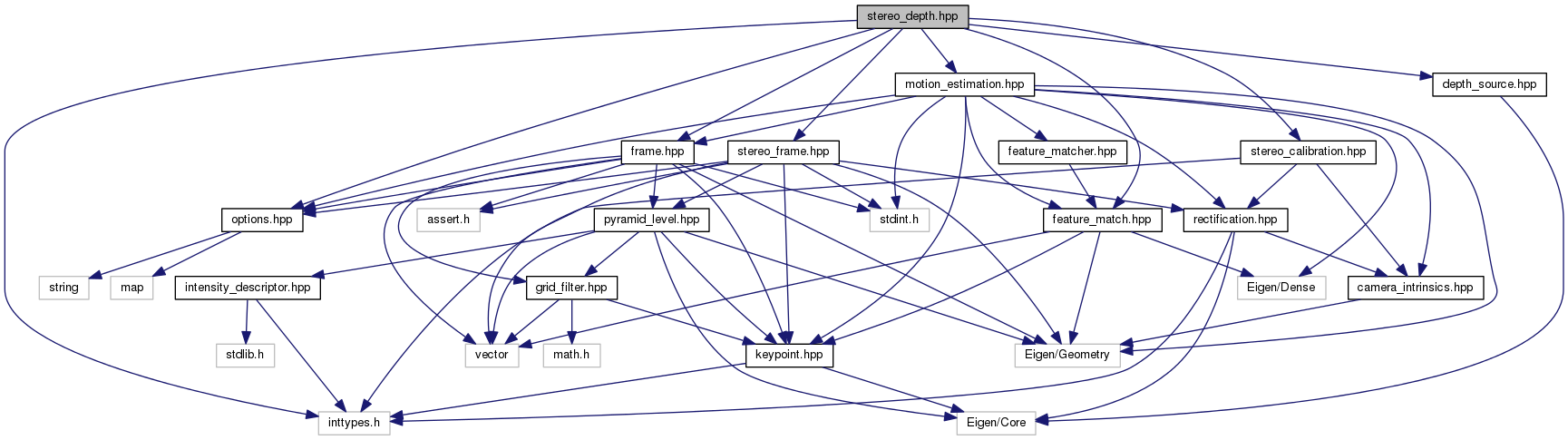
#include <inttypes.h>#include "stereo_calibration.hpp"#include "depth_source.hpp"#include "frame.hpp"#include "stereo_frame.hpp"#include "feature_match.hpp"#include "options.hpp"#include "motion_estimation.hpp"
Include dependency graph for stereo_depth.hpp:
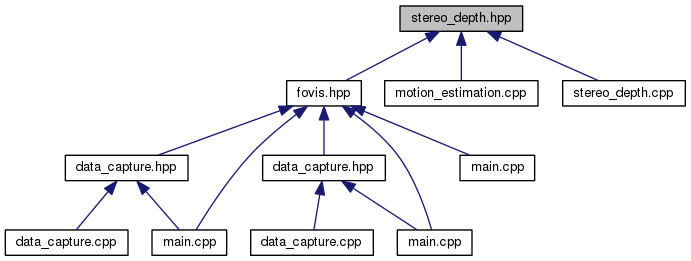
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | fovis::StereoDepth |
| Stores image data for a stereo camera pair. More... | |
Namespaces | |
| namespace | fovis |
quick and dirty profiling tool. inspired by the matlab tic/toc command | |