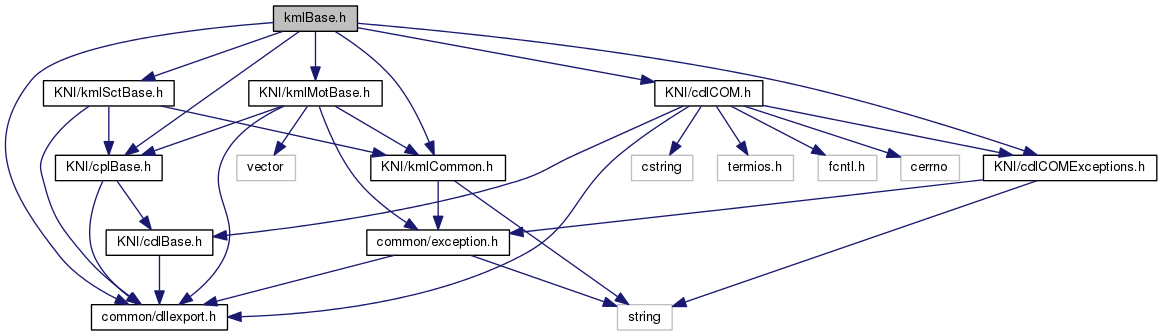
#include "common/dllexport.h"#include "KNI/cplBase.h"#include "KNI/kmlCommon.h"#include "KNI/kmlMotBase.h"#include "KNI/kmlSctBase.h"#include "KNI/cdlCOM.h"#include "KNI/cdlCOMExceptions.h"
Include dependency graph for kmlBase.h:
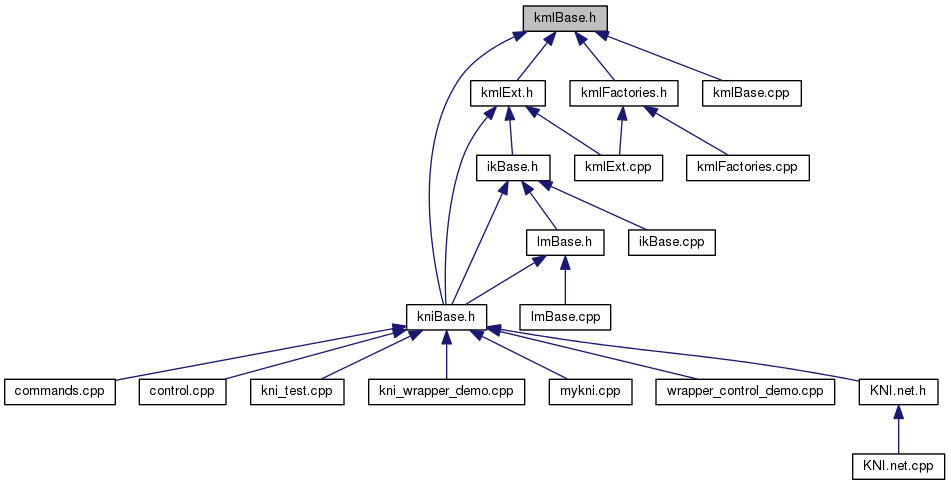
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | CKatBase |
| Base Katana class. More... | |
| struct | TKatCBX |
| [CBX] connector box More... | |
| struct | TKatCTB |
| [CTB] command table defined in the firmware More... | |
| struct | TKatECH |
| [ECH] echo More... | |
| struct | TKatEFF |
| Inverse Kinematics structure of the endeffektor. More... | |
| struct | TKatGNL |
| [GNL] general robot attributes More... | |
| struct | TKatIDS |
| [IDS] identification string More... | |
| struct | TKatMFW |
| [MFW] master firmware version/revision number More... | |
Defines | |
| #define | BYTE_DECLARED |
| #define | K400_OLD_PROTOCOL_THRESHOLD 3 |
| The old protocol is only supported up to K400 version 0.x.x. | |
| #define | TM_ENDLESS -1 |
| timeout symbol for 'endless' waiting | |
Typedefs | |
| typedef unsigned char | byte |
| type specification (8 bit) | |
Define Documentation
| #define BYTE_DECLARED |
| #define K400_OLD_PROTOCOL_THRESHOLD 3 |
| #define TM_ENDLESS -1 |