motor thermo estimation component More...
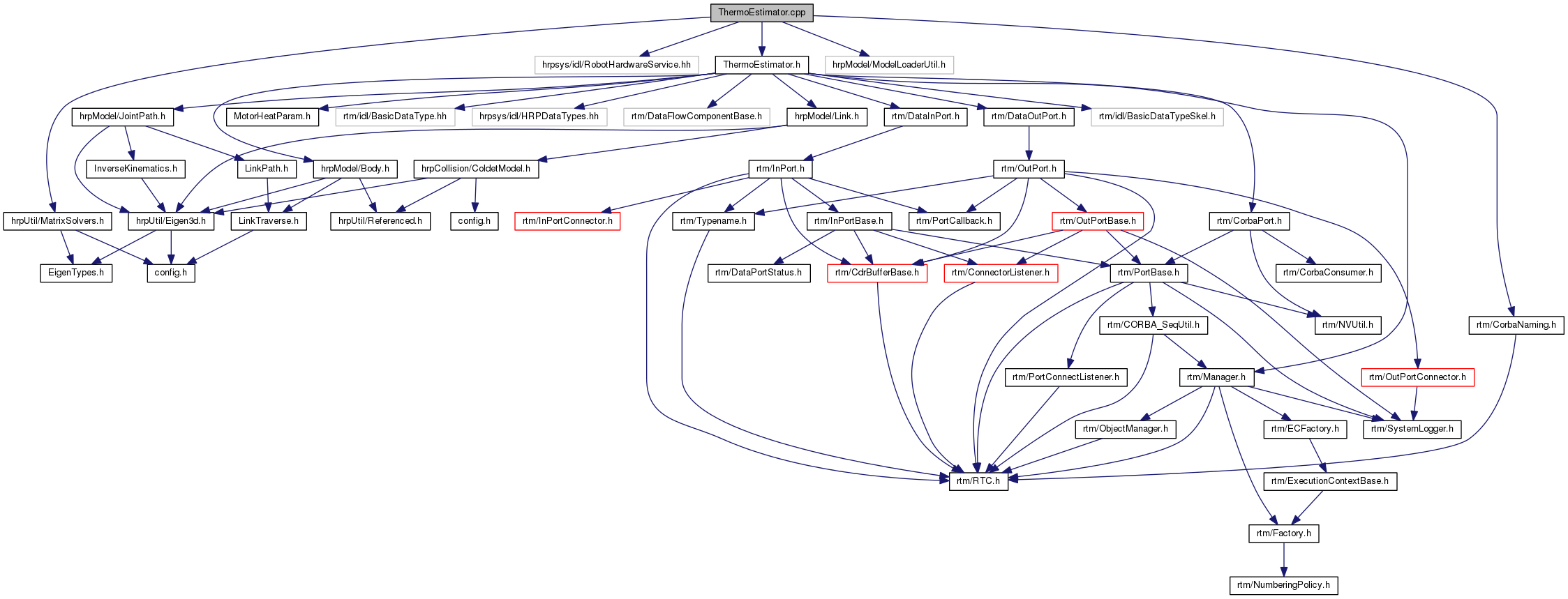
#include "ThermoEstimator.h"#include "hrpsys/idl/RobotHardwareService.hh"#include <rtm/CorbaNaming.h>#include <hrpModel/ModelLoaderUtil.h>#include <hrpUtil/MatrixSolvers.h>
Include dependency graph for ThermoEstimator.cpp:
Go to the source code of this file.
Functions | |
| void | ThermoEstimatorInit (RTC::Manager *manager) |
Variables | |
| static const char * | thermoestimator_spec [] |
Detailed Description
motor thermo estimation component
Design of High Torque and High Speed Leg Module for High Power Humanoid Junichi Urata et al., IROS 2010, pp 4497 - 4502 Tnew = T + (((Re*K^2/C) * tau^2) - ((1/RC) * (T - Ta))) * dt
$Date$
$Id$
Definition in file ThermoEstimator.cpp.
Function Documentation
| void ThermoEstimatorInit | ( | RTC::Manager * | manager | ) |
Definition at line 386 of file ThermoEstimator.cpp.
Variable Documentation
const char* thermoestimator_spec[] [static] |
Initial value:
{
"implementation_id", "ThermoEstimator",
"type_name", "ThermoEstimator",
"description", "null component",
"version", HRPSYS_PACKAGE_VERSION,
"vendor", "AIST",
"category", "example",
"activity_type", "DataFlowComponent",
"max_instance", "10",
"language", "C++",
"lang_type", "compile",
"conf.default.debugLevel", "0",
""
}
Definition at line 23 of file ThermoEstimator.cpp.