#include <VisualizationBase.hpp>
Public Member Functions | |
| virtual bool | initialize ()=0 |
| bool | isActive () const |
| virtual bool | readParameters (XmlRpc::XmlRpcValue &config) |
| VisualizationBase (ros::NodeHandle &nodeHandle, const std::string &name) | |
| virtual bool | visualize (const grid_map::GridMap &map)=0 |
| virtual | ~VisualizationBase () |
Protected Member Functions | |
| bool | getParam (const std::string &name, std::string &value) |
| bool | getParam (const std::string &name, double &value) |
| bool | getParam (const std::string &name, float &value) |
| bool | getParam (const std::string &name, int &value) |
| bool | getParam (const std::string &name, bool &value) |
Protected Attributes | |
| std::string | name_ |
| Name of the visualization. | |
| ros::NodeHandle & | nodeHandle_ |
| ROS nodehandle. | |
| StringMap | parameters_ |
| Storage of the parsed XML parameters. | |
| ros::Publisher | publisher_ |
| ROS publisher of the occupancy grid. | |
Detailed Description
Definition at line 20 of file VisualizationBase.hpp.
Constructor & Destructor Documentation
| grid_map_visualization::VisualizationBase::VisualizationBase | ( | ros::NodeHandle & | nodeHandle, |
| const std::string & | name | ||
| ) |
Constructor.
- Parameters:
-
nodeHandle the ROS node handle. name the name of the visualization.
Definition at line 13 of file VisualizationBase.cpp.
Destructor.
Definition at line 19 of file VisualizationBase.cpp.
Member Function Documentation
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| std::string & | value | ||
| ) | [protected] |
Get a visualization parameter as a string.
- Parameters:
-
[in] name the name of the parameter [out] value the string to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 53 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| double & | value | ||
| ) | [protected] |
Get a visualization parameter as a double.
- Parameters:
-
[in] name the name of the parameter [out] value the double to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 62 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| float & | value | ||
| ) | [protected] |
Get a visualization parameter as a float.
- Parameters:
-
[in] name the name of the parameter [out] value the float to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 73 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| int & | value | ||
| ) | [protected] |
Get a visualization parameter as an integer.
- Parameters:
-
[in] name the name of the parameter [out] value the int to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 90 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::getParam | ( | const std::string & | name, |
| bool & | value | ||
| ) | [protected] |
Get a visualization parameter as a boolean.
- Parameters:
-
[in] name the name of the parameter [out] value the boolean to set with the value.
- Returns:
- true if parameter was found, false otherwise.
Definition at line 81 of file VisualizationBase.cpp.
| virtual bool grid_map_visualization::VisualizationBase::initialize | ( | ) | [pure virtual] |
Initialization.
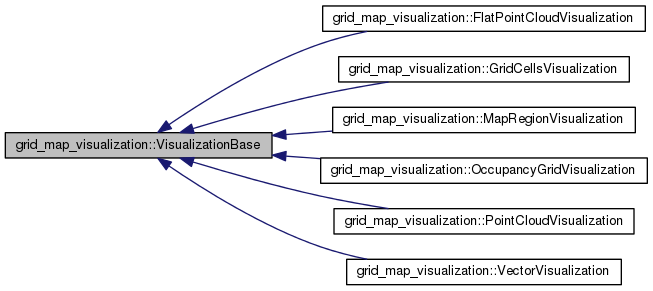
Implemented in grid_map_visualization::VectorVisualization, grid_map_visualization::MapRegionVisualization, grid_map_visualization::FlatPointCloudVisualization, grid_map_visualization::PointCloudVisualization, grid_map_visualization::GridCellsVisualization, and grid_map_visualization::OccupancyGridVisualization.
| bool grid_map_visualization::VisualizationBase::isActive | ( | ) | const |
Checks if visualization is active (if somebody has actually subscribed).
- Returns:
- true if active, false otherwise.
Definition at line 23 of file VisualizationBase.cpp.
| bool grid_map_visualization::VisualizationBase::readParameters | ( | XmlRpc::XmlRpcValue & | config | ) | [virtual] |
Read parameters from ROS.
- Parameters:
-
config the parameters as XML.
- Returns:
- true if successful.
Reimplemented in grid_map_visualization::VectorVisualization, grid_map_visualization::MapRegionVisualization, grid_map_visualization::FlatPointCloudVisualization, grid_map_visualization::PointCloudVisualization, grid_map_visualization::GridCellsVisualization, and grid_map_visualization::OccupancyGridVisualization.
Definition at line 29 of file VisualizationBase.cpp.
| virtual bool grid_map_visualization::VisualizationBase::visualize | ( | const grid_map::GridMap & | map | ) | [pure virtual] |
Generates the visualization.
- Parameters:
-
map the grid map to visualize.
- Returns:
- true if successful.
Implemented in grid_map_visualization::VectorVisualization, grid_map_visualization::MapRegionVisualization, grid_map_visualization::FlatPointCloudVisualization, grid_map_visualization::PointCloudVisualization, grid_map_visualization::GridCellsVisualization, and grid_map_visualization::OccupancyGridVisualization.
Member Data Documentation
std::string grid_map_visualization::VisualizationBase::name_ [protected] |
Name of the visualization.
Definition at line 107 of file VisualizationBase.hpp.
ROS nodehandle.
Definition at line 104 of file VisualizationBase.hpp.
Storage of the parsed XML parameters.
Definition at line 110 of file VisualizationBase.hpp.
ROS publisher of the occupancy grid.
Definition at line 113 of file VisualizationBase.hpp.
The documentation for this class was generated from the following files: