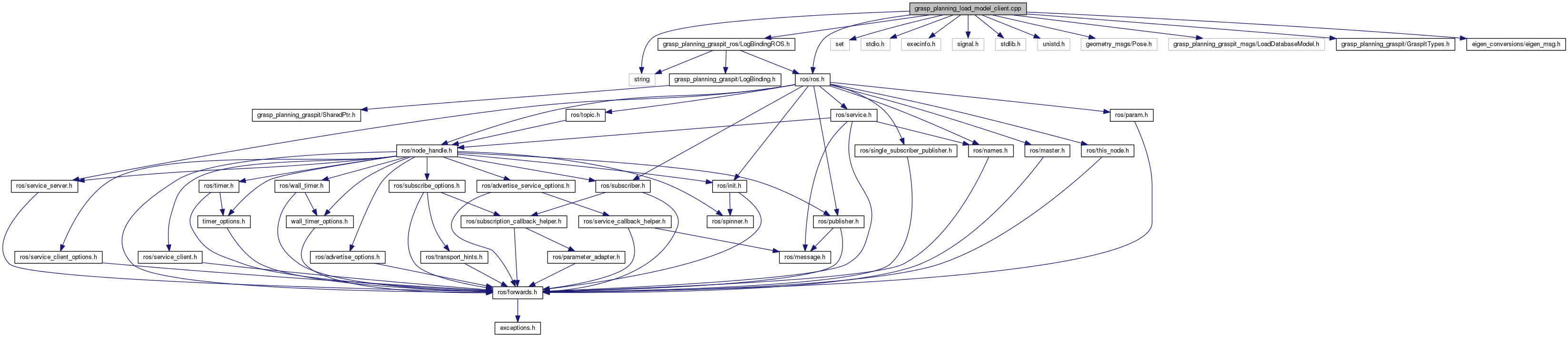
#include <string>#include <set>#include <stdio.h>#include <execinfo.h>#include <signal.h>#include <stdlib.h>#include <unistd.h>#include <ros/ros.h>#include <geometry_msgs/Pose.h>#include <grasp_planning_graspit_ros/LogBindingROS.h>#include <grasp_planning_graspit_msgs/LoadDatabaseModel.h>#include <grasp_planning_graspit/GraspItTypes.h>#include <eigen_conversions/eigen_msg.h>
Include dependency graph for grasp_planning_load_model_client.cpp:
Go to the source code of this file.
Functions | |
| void | handler (int sig) |
| int | main (int argc, char **argv) |
| void | print_trace (void) |
| void | printHelp (const char *progName) |
| int | run (int argc, char **argv) |
Function Documentation
| void handler | ( | int | sig | ) |
Definition at line 64 of file grasp_planning_load_model_client.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 175 of file grasp_planning_load_model_client.cpp.
| void print_trace | ( | void | ) |
Helper method to print the trace in case of a SIG* event
Definition at line 45 of file grasp_planning_load_model_client.cpp.
| void printHelp | ( | const char * | progName | ) |
Definition at line 71 of file grasp_planning_load_model_client.cpp.
| int run | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 76 of file grasp_planning_load_model_client.cpp.