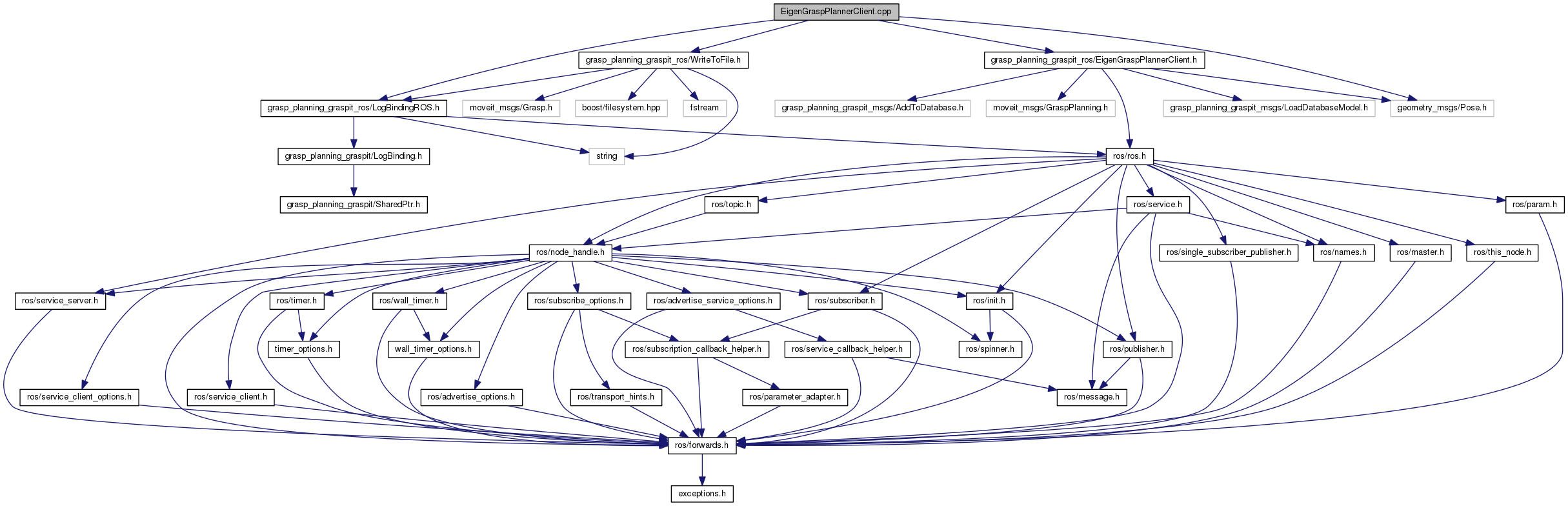
#include <grasp_planning_graspit_ros/EigenGraspPlannerClient.h>#include <grasp_planning_graspit_ros/LogBindingROS.h>#include <grasp_planning_graspit_ros/WriteToFile.h>#include <geometry_msgs/Pose.h>
Include dependency graph for EigenGraspPlannerClient.cpp:
Go to the source code of this file.
Defines | |
| #define | DEFAULT_ADD_DB_TOPIC "graspit_add_to_db" |
| #define | DEFAULT_EGPLANNING_TOPIC "graspit_eg_planning" |
| #define | DEFAULT_LOAD_MODEL_TOPIC "graspit_add_to_db" |
| #define | DEFAULT_SAVE_WORLD_TOPIC "graspit_save_world" |
Define Documentation
| #define DEFAULT_ADD_DB_TOPIC "graspit_add_to_db" |
Definition at line 6 of file EigenGraspPlannerClient.cpp.
| #define DEFAULT_EGPLANNING_TOPIC "graspit_eg_planning" |
Definition at line 9 of file EigenGraspPlannerClient.cpp.
| #define DEFAULT_LOAD_MODEL_TOPIC "graspit_add_to_db" |
Definition at line 7 of file EigenGraspPlannerClient.cpp.
| #define DEFAULT_SAVE_WORLD_TOPIC "graspit_save_world" |
Definition at line 8 of file EigenGraspPlannerClient.cpp.