#include <assert.h>#include <sys/time.h>#include "CRC.hpp"#include "CV.hpp"#include "File.hpp"#include "FEC.hpp"#include "Map.hpp"#include "String.hpp"#include "Tag.hpp"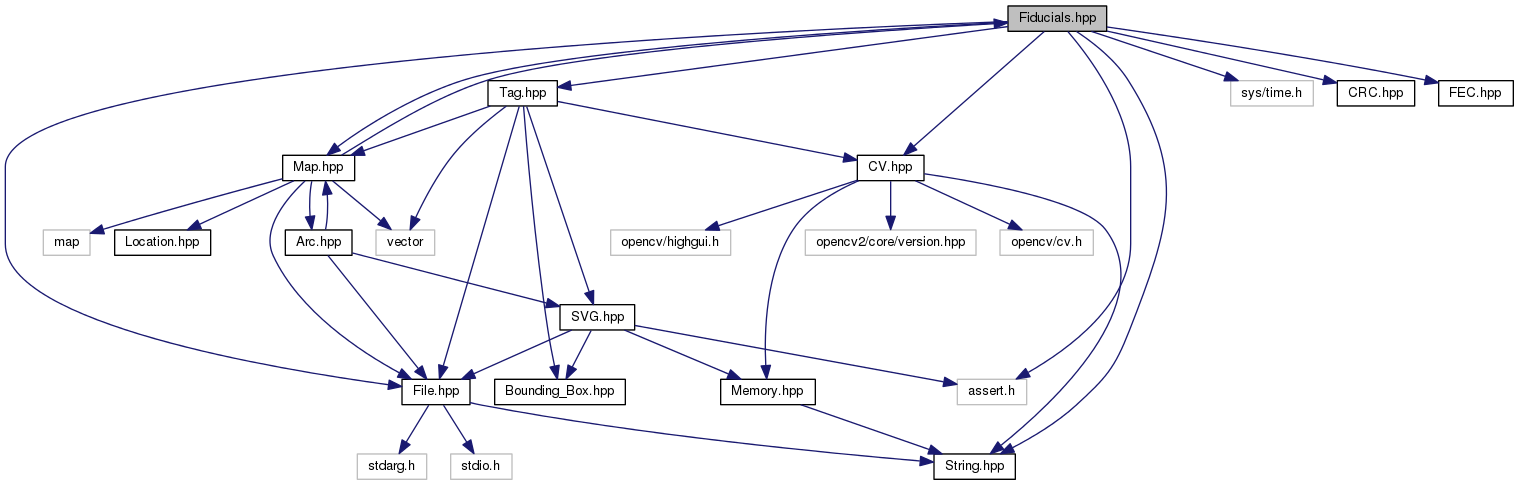
Go to the source code of this file.
Classes | |
| struct | Fiducials__Struct |
| struct | Fiducials_Create__Struct |
| struct | Fiducials_Results__Struct |
Typedefs | |
| typedef struct Fiducials__Struct * | Fiducials |
| typedef void(* | Fiducials_Arc_Announce_Routine )(void *announce_object, int from_id, double from_x, double from_y, double from_z, int to_id, double to_x, double to_y, double to_z, double goodness, bool in_spanning_tree) |
| typedef struct Fiducials_Create__Struct * | Fiducials_Create |
| typedef void(* | Fiducials_Fiducial_Announce_Routine )(void *announce_object, int id, int direction, double world_diagonal, double x1, double y1, double x2, double y2, double x3, double y3, double x4, double y4) |
| typedef void(* | Fiducials_Location_Announce_Routine )(void *announce_object, int id, double x, double y, double z, double bearing) |
| typedef struct Fiducials_Results__Struct * | Fiducials_Results |
| typedef void(* | Fiducials_Tag_Announce_Routine )(void *announce_object, int id, double x, double y, double z, double twist, double diagonal, double distance_per_pixel, bool visible, int hop_count) |
| typedef bool | Mapping [64] |
| typedef struct timeval * | Time_Value |
Functions | |
| void | Fiducials__arc_announce (void *announce_object, int from_id, double from_x, double from_y, double from_z, int to_id, double to_x, double to_y, double to_z, double goodness, bool in_spanning_tree) |
| Callback routine that prints a new *Arc* object when it shows up. | |
| Fiducials | Fiducials__create (CV_Image original_image, Fiducials_Create fiducials_create) |
| Create and return a *Fiducials* object. | |
| void | Fiducials__free (Fiducials fiduicals) |
| will release the storage associated with *fiducials*. | |
| void | Fiducials__image_set (Fiducials fiducials, CV_Image image) |
| Sets the original image for *fiducials. | |
| void | Fiducials__image_show (Fiducials fiducials, bool show) |
| Is a HighGUI interface to show the current image. | |
| void | Fiducials__location_announce (void *object, int id, double x, double y, double z, double bearing) |
| Callback routine that prints out location when it changes. | |
| int | Fiducials__point_sample (Fiducials fiducials, CV_Point2D32F point) |
| Helper routine to sample a point from the image in *fiducials*. | |
| int | Fiducials__points_maximum (Fiducials fiducials, CV_Point2D32F_Vector points, unsigned int start_index, unsigned int end_index) |
| Return the maximum value of the points in *points*. | |
| int | Fiducials__points_minimum (Fiducials fiducials, CV_Point2D32F_Vector points, unsigned int start_index, unsigned int end_index) |
| Return the minimum value of the points in *points*. | |
| Fiducials_Results | Fiducials__process (Fiducials fiducials) |
| Process the current image associated with *fiducials*. | |
| CV_Point2D32F_Vector | Fiducials__references_compute (Fiducials fiducials, CV_Point2D32F_Vector corners) |
| Return 8 sample locations to determine if a quadralateral is worth testing for quadralateral'ness. | |
| void | Fiducials__sample_points_compute (CV_Point2D32F_Vector corners, CV_Point2D32F_Vector sample_points) |
| Compute the fiducial locations to sample using *corners*. | |
| void | Fiducials__sample_points_helper (String_Const label, CV_Point2D32F corner, CV_Point2D32F sample_point) |
| void | Fiducials__tag_announce (void *announce_object, int id, double x, double y, double z, double twist, double diagonal, double distance_per_pixel, bool visible, int hop_count) |
| Print out tag update information. | |
| Fiducials_Create | Fiducials_Create__one_and_only (void) |
| Returns the one and only *Fiducials_Create* object. | |
Typedef Documentation
| typedef struct Fiducials__Struct* Fiducials |
Definition at line 6 of file Fiducials.hpp.
| typedef void(* Fiducials_Arc_Announce_Routine)(void *announce_object, int from_id, double from_x, double from_y, double from_z, int to_id, double to_x, double to_y, double to_z, double goodness, bool in_spanning_tree) |
Definition at line 13 of file Fiducials.hpp.
| typedef struct Fiducials_Create__Struct* Fiducials_Create |
Definition at line 7 of file Fiducials.hpp.
| typedef void(* Fiducials_Fiducial_Announce_Routine)(void *announce_object, int id, int direction, double world_diagonal, double x1, double y1, double x2, double y2, double x3, double y3, double x4, double y4) |
Definition at line 26 of file Fiducials.hpp.
| typedef void(* Fiducials_Location_Announce_Routine)(void *announce_object, int id, double x, double y, double z, double bearing) |
Definition at line 18 of file Fiducials.hpp.
| typedef struct Fiducials_Results__Struct* Fiducials_Results |
Definition at line 8 of file Fiducials.hpp.
| typedef void(* Fiducials_Tag_Announce_Routine)(void *announce_object, int id, double x, double y, double z, double twist, double diagonal, double distance_per_pixel, bool visible, int hop_count) |
Definition at line 21 of file Fiducials.hpp.
| typedef bool Mapping[64] |
Definition at line 41 of file Fiducials.hpp.
| typedef struct timeval* Time_Value |
Definition at line 44 of file Fiducials.hpp.
Function Documentation
| void Fiducials__arc_announce | ( | void * | announce_object, |
| int | from_id, | ||
| double | from_x, | ||
| double | from_y, | ||
| double | from_z, | ||
| int | to_id, | ||
| double | to_x, | ||
| double | to_y, | ||
| double | to_z, | ||
| double | goodness, | ||
| bool | in_spanning_tree | ||
| ) |
Callback routine that prints a new *Arc* object when it shows up.
- Parameters:
-
announce_object is unused (other routines might us it). from_id is the tag identifier that has the lower tag id number. from_x is the X coordinate of the from tag. from_y is the Y coordinate of the from tag. from_z is the Z coordinate of the from tag. to_id is the tag identifier that has the higher tag id number. to_x is the X coordinate of the to tag. to_y is the Y coordinate of the to tag. to_z is the Z coordinate of the to tag. goodness is the distance between the arc center point and the camera. in_spanning_tree is true if the arc is in the spanning tree.
Fiducials__arc_announce*() is a callback routine that can be called whenever an arc data structure is modified. The announce routine is specified as an argument to *Map__create*().
Definition at line 414 of file Fiducials.cpp.
| Fiducials Fiducials__create | ( | CV_Image | original_image, |
| Fiducials_Create | fiducials_create | ||
| ) |
Create and return a *Fiducials* object.
- Parameters:
-
original_image is the image to start with. fiducials_create is a *Fiducials_Create* object that specifies the various features to enable or disable.
Fiducials__create*() creates and returns a *Fiducials* object using the values in *fiduicials_create*.
Definition at line 611 of file Fiducials.cpp.
| void Fiducials__free | ( | Fiducials | fiducials | ) |
will release the storage associated with *fiducials*.
- Parameters:
-
fiducials is the *Fiducials* object to release.
Fiducials__free*() releases the storage associated with *fiducials*.
Definition at line 850 of file Fiducials.cpp.
| void Fiducials__image_set | ( | Fiducials | fiducials, |
| CV_Image | image | ||
| ) |
Sets the original image for *fiducials.
- Parameters:
-
fiducials is the *Fiducials* object to use. image is the new image to use as the original image.
Fiducials__image_set*() will set the original image for *fiducials* to *image*.
Definition at line 481 of file Fiducials.cpp.
| void Fiducials__image_show | ( | Fiducials | fiducials, |
| bool | show | ||
| ) |
Is a HighGUI interface to show the current image.
- Parameters:
-
fiducials is the *Fiducials* object that contains the image. show is true to force the HighGUI interface to activate.
Fiducials__image_show*() will cause an image to be shown with at each of the various stages of the recognition cycle. This only occurs if *show* is *true*.
The character commands are:
'/033' -- Escape from program. '+' -- View next stage in processing pipeline. '-' -- View previous stage in processing pipeline. '<' -- Goto beginning of processing pipeline. 'b' -- Toggle image blur. 'f' -- Flip fiducials allong X axis
Definition at line 505 of file Fiducials.cpp.
| void Fiducials__location_announce | ( | void * | announce_object, |
| int | id, | ||
| double | x, | ||
| double | y, | ||
| double | z, | ||
| double | bearing | ||
| ) |
Callback routine that prints out location when it changes.
- Parameters:
-
announce_object is unused. id is ??? x is the X location of the robot. y is the Y location of the robot. z is the Y location of the robot (currently ignored.) bearing is the robot bearin in radians.
Fiducials__location_announce*() is a callback routine that can be calld to print out the location information. The location announce routine is a field of the *Fiducials_Create__Struct*.
Definition at line 439 of file Fiducials.cpp.
| int Fiducials__point_sample | ( | Fiducials | fiducials, |
| CV_Point2D32F | point | ||
| ) |
Helper routine to sample a point from the image in *fiducials*.
- Parameters:
-
fiducials is the *Fiducials* object that contains the image. point is the point location to sample.
- Returns:
- weighted sample value.
Fiducials__point_sample*() will return a weighted sample value for point* in the image associated with *fiducials*. The weight algorithm is controlled by the *weights_index* field of *fiducials*. The returned value is between 0 (black) to 255 (white).
Definition at line 1541 of file Fiducials.cpp.
| int Fiducials__points_maximum | ( | Fiducials | fiducials, |
| CV_Point2D32F_Vector | points, | ||
| unsigned int | start_index, | ||
| unsigned int | end_index | ||
| ) |
Return the maximum value of the points in *points*.
- Parameters:
-
fiducials is the *Fiducials* object that contains the image. points is the vector of points to sample. start_index is the first index to start with. end_index is the last index to end with.
- Returns:
- the maximum sampled value.
Fiducials__points_maximum*() will sweep from *start_index* to end_index* through *points*. Using each selected point in *points*}, the corresponding value in *image* is sampled. The minimum of the sampled point is returned.
Definition at line 1782 of file Fiducials.cpp.
| int Fiducials__points_minimum | ( | Fiducials | fiducials, |
| CV_Point2D32F_Vector | points, | ||
| unsigned int | start_index, | ||
| unsigned int | end_index | ||
| ) |
Return the minimum value of the points in *points*.
- Parameters:
-
fiducials is the *Fiducials* object that contains the image. points is the vector of points to sample. start_index is the first index to start with. end_index is the last index to end with.
- Returns:
- the minimum sampled value.
Fiducials__points_minimum*() will sweep from *start_index* to end_index* through *points*. Using each selected point in *points*}, the corresponding value in *image* is sampled. The minimum of the sampled point is returned.
Definition at line 1814 of file Fiducials.cpp.
| Fiducials_Results Fiducials__process | ( | Fiducials | fiducials | ) |
Process the current image associated with *fiducials*.
- Parameters:
-
fiducials is the *Fiducials* object to use.
- Returns:
- a *Fiducials_Results* that contains information about how the processing worked.
Fiducials__process*() will process *fiducials* to determine the robot location.
Definition at line 910 of file Fiducials.cpp.
| CV_Point2D32F_Vector Fiducials__references_compute | ( | Fiducials | fiducials, |
| CV_Point2D32F_Vector | corners | ||
| ) |
Return 8 sample locations to determine if a quadralateral is worth testing for quadralateral'ness.
- Parameters:
-
fiducials is the *Fiducals* object that contains the image. corners is the 4 potential fiducial corners.
- Returns:
- a vector 8 places to test for ficial'ness.
Fiducials__references_compute*() 4 corner points in *corners* to compute 8 reference points that are returned. The first 4 reference points will be just outside of the quadrateral formed by *corners* (i.e. the white bounding box) and the last 4 reference points are on the inside (i.e. the black bounding box). The returned vector is perminately allocated in *fiducials*, so it does not need to have it storage released.
Definition at line 1691 of file Fiducials.cpp.
| void Fiducials__sample_points_compute | ( | CV_Point2D32F_Vector | corners, |
| CV_Point2D32F_Vector | sample_points | ||
| ) |
Compute the fiducial locations to sample using *corners*.
- Parameters:
-
corners is the the 4 of the fiducials. sample_points is the 64 vector of points that are computed.
Fiducials__sample_points_compute*() will use the 4 corners in corners* as a quadralateral to compute an 8 by 8 grid of tag bit sample points and store the results into the the 64 preallocated *CV_Point2D32F* objects in *sample_points*. The quadralateral must be convex and in the counter-clockwise direction. Bit 0 will be closest to corners[1], bit 7 will be closest to corners[0], bit 56 closest to corners[2] and bit 63 closest to corners[3].
Definition at line 1848 of file Fiducials.cpp.
| void Fiducials__sample_points_helper | ( | String_Const | label, |
| CV_Point2D32F | corner, | ||
| CV_Point2D32F | sample_point | ||
| ) |
| void Fiducials__tag_announce | ( | void * | announce_object, |
| int | id, | ||
| double | x, | ||
| double | y, | ||
| double | z, | ||
| double | twist, | ||
| double | diagonal, | ||
| double | distance_per_pixel, | ||
| bool | visible, | ||
| int | hop_count | ||
| ) |
Print out tag update information.
- Parameters:
-
announce_object is an opaque object from *Map*->*announce_object*. id is the tag id. x is the tag X location. y is the tag Y location. z is the tag Z location. twist is the tag twist in radians. diagonal is the tag diagonal distance. distance_per_pixel is the distance per pixel. visible is (*bool*)1 if the tag is currently in camera field of view, and (*bool*)0 otherwise. hop_count is the hop count along the spanning tree to the origin.
Fiducials_tag_announce*() is a tag announce routine that can be fed into *Fiducials__create*() as a routine to call each time a tag is updated.
Definition at line 1979 of file Fiducials.cpp.
Returns the one and only *Fiducials_Create* object.
- Returns:
- the one and only *Fiducials_Create* object.
Fiducials_Create__one_and_only*() will return the one and only Fiducials_Create* object. This object needs to be initalized prior to calling *Fiduciasl__create*().
Definition at line 2011 of file Fiducials.cpp.