#include <ros/ros.h>#include <hardware_interface/actuator_command_interface.h>#include <hardware_interface/actuator_state_interface.h>#include <diagnostic_updater/diagnostic_updater.h>#include "epos_hardware/utils.h"
Include dependency graph for epos.h:

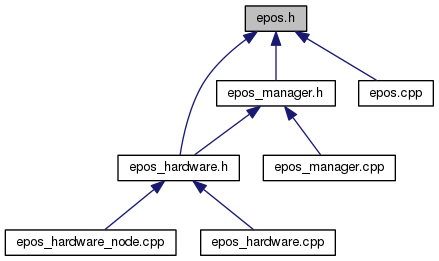
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | epos_hardware::Epos |
Namespaces | |
| namespace | epos_hardware |
Defines | |
| #define | CURRENT_LIMIT_ACTIVE (11) |
| #define | ENABLE (2) |
| #define | FAULT (3) |
| #define | QUICKSTOP (5) |
| #define | READY_TO_SWITCH_ON (0) |
| #define | STATUSWORD(b, v) ((v >> b) & 1) |
| #define | SWITCHED_ON (1) |
| #define | TARGET_REACHED (10) |
| #define | VOLTAGE_ENABLED (4) |
| #define | WARNING (7) |
Define Documentation
| #define CURRENT_LIMIT_ACTIVE (11) |
| #define READY_TO_SWITCH_ON (0) |
| #define STATUSWORD | ( | b, | |
| v | |||
| ) | ((v >> b) & 1) |
| #define SWITCHED_ON (1) |
| #define TARGET_REACHED (10) |
| #define VOLTAGE_ENABLED (4) |