SLAM implementation using iSAM. More...
#include <iomanip>#include <vector>#include <map>#include <list>#include "isam/util.h"#include "isam/SparseSystem.h"#include "isam/OptimizationInterface.h"#include "isam/covariance.h"#include "isam/Slam.h"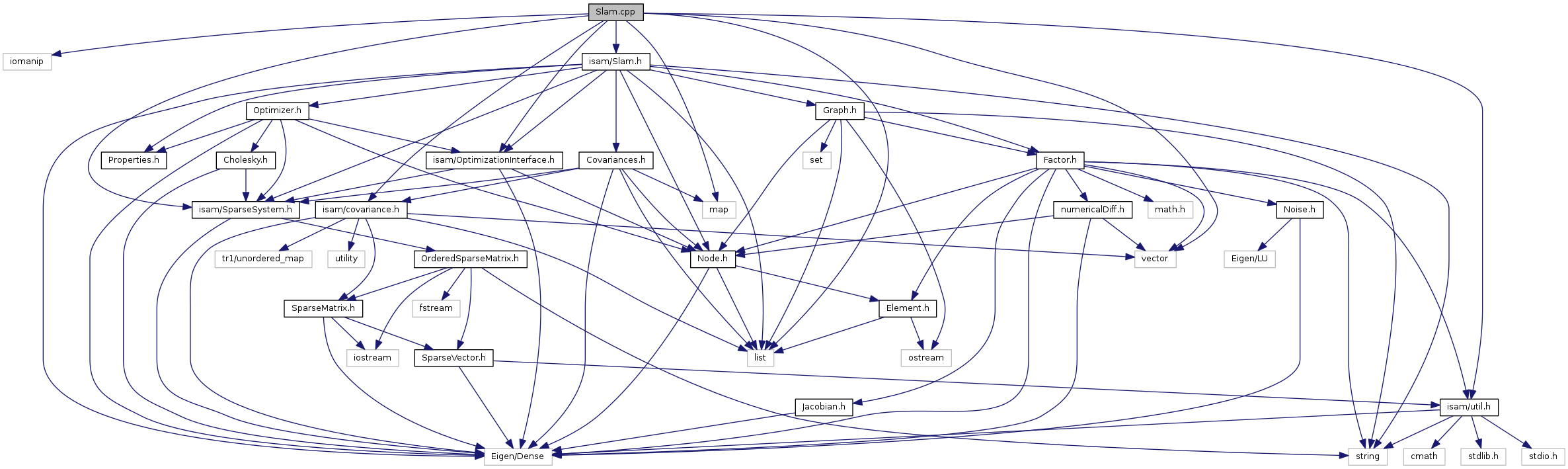
Go to the source code of this file.
Classes | |
| struct | isam::DeleteOnReturn |
Namespaces | |
| namespace | isam |
Detailed Description
SLAM implementation using iSAM.
- Version:
- Id:
- Slam.cpp 7610 2012-10-25 10:21:12Z hordurj
Copyright (C) 2009-2013 Massachusetts Institute of Technology. Michael Kaess, Hordur Johannsson, David Rosen, Nicholas Carlevaris-Bianco and John. J. Leonard
This file is part of iSAM.
iSAM is free software; you can redistribute it and/or modify it under the terms of the GNU Lesser General Public License as published by the Free Software Foundation; either version 2.1 of the License, or (at your option) any later version.
iSAM is distributed in the hope that it will be useful, but WITHOUT ANY WARRANTY; without even the implied warranty of MERCHANTABILITY or FITNESS FOR A PARTICULAR PURPOSE. See the GNU Lesser General Public License for more details.
You should have received a copy of the GNU Lesser General Public License along with iSAM. If not, see <http://www.gnu.org/licenses/>.
Definition in file Slam.cpp.