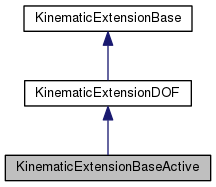
Class implementing a mobile base KinematicExtension with Cartesian DoFs (lin_x, lin_y, rot_z) enabled (i.e. 2D). More...
#include <kinematic_extension_dof.h>
Public Member Functions | |
| KDL::Jacobian | adjustJacobian (const KDL::Jacobian &jac_chain) |
| JointStates | adjustJointStates (const JointStates &joint_states) |
| LimiterParams | adjustLimiterParams (const LimiterParams &limiter_params) |
| void | baseTwistCallback (const geometry_msgs::Twist::ConstPtr &msg) |
| bool | initExtension () |
| KinematicExtensionBaseActive (const TwistControllerParams ¶ms) | |
| void | processResultExtension (const KDL::JntArray &q_dot_ik) |
| ~KinematicExtensionBaseActive () | |
Private Attributes | |
| ros::Publisher | base_vel_pub_ |
| double | max_vel_lin_base_ |
| double | max_vel_rot_base_ |
| double | min_vel_lin_base_ |
| double | min_vel_rot_base_ |
Detailed Description
Class implementing a mobile base KinematicExtension with Cartesian DoFs (lin_x, lin_y, rot_z) enabled (i.e. 2D).
Definition at line 62 of file kinematic_extension_dof.h.
Constructor & Destructor Documentation
| KinematicExtensionBaseActive::KinematicExtensionBaseActive | ( | const TwistControllerParams & | params | ) | [inline, explicit] |
Definition at line 65 of file kinematic_extension_dof.h.
Definition at line 81 of file kinematic_extension_dof.h.
Member Function Documentation
| KDL::Jacobian KinematicExtensionBaseActive::adjustJacobian | ( | const KDL::Jacobian & | jac_chain | ) | [virtual] |
Method adjusting the Jacobian used in inverse differential computation. Enable Cartesian DoFs (lin_x, lin_y, rot_z) considering current transformation to main kinematic chain.
get required transformations
active base can move in lin_x, lin_y and rot_z
Implements KinematicExtensionDOF.
Definition at line 163 of file kinematic_extension_dof.cpp.
| JointStates KinematicExtensionBaseActive::adjustJointStates | ( | const JointStates & | joint_states | ) | [virtual] |
Method adjusting the JointStates used in inverse differential computation and limiters. Fill neutrally.
Implements KinematicExtensionDOF.
Definition at line 205 of file kinematic_extension_dof.cpp.
| LimiterParams KinematicExtensionBaseActive::adjustLimiterParams | ( | const LimiterParams & | limiter_params | ) | [virtual] |
Method adjusting the LimiterParams used in limiters. Appends limits for BaseActive
Implements KinematicExtensionDOF.
Definition at line 234 of file kinematic_extension_dof.cpp.
| void KinematicExtensionBaseActive::baseTwistCallback | ( | const geometry_msgs::Twist::ConstPtr & | msg | ) |
| bool KinematicExtensionBaseActive::initExtension | ( | ) | [virtual] |
Implements KinematicExtensionDOF.
Definition at line 134 of file kinematic_extension_dof.cpp.
| void KinematicExtensionBaseActive::processResultExtension | ( | const KDL::JntArray & | q_dot_ik | ) | [virtual] |
Method processing the partial result related to the kinematic extension. Publish desired Twist to the 'command' topic of the base.
Implements KinematicExtensionDOF.
Definition at line 257 of file kinematic_extension_dof.cpp.
Member Data Documentation
Definition at line 92 of file kinematic_extension_dof.h.
double KinematicExtensionBaseActive::max_vel_lin_base_ [private] |
Definition at line 96 of file kinematic_extension_dof.h.
double KinematicExtensionBaseActive::max_vel_rot_base_ [private] |
Definition at line 97 of file kinematic_extension_dof.h.
double KinematicExtensionBaseActive::min_vel_lin_base_ [private] |
Definition at line 94 of file kinematic_extension_dof.h.
double KinematicExtensionBaseActive::min_vel_rot_base_ [private] |
Definition at line 95 of file kinematic_extension_dof.h.
The documentation for this class was generated from the following files: