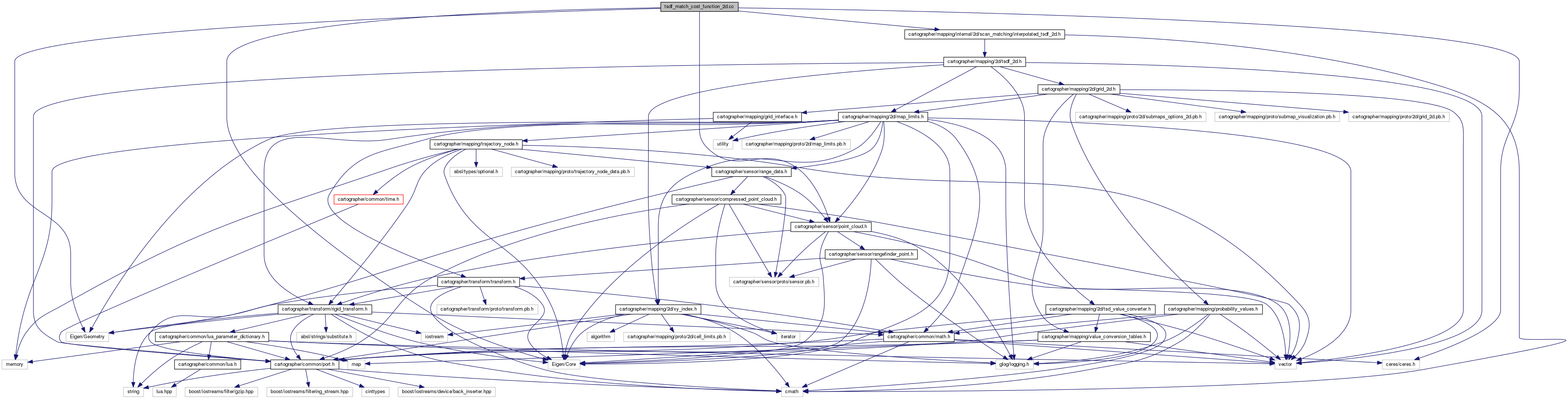
#include "Eigen/Core"#include "Eigen/Geometry"#include "cartographer/mapping/internal/2d/scan_matching/interpolated_tsdf_2d.h"#include "cartographer/sensor/point_cloud.h"#include "ceres/ceres.h"
Include dependency graph for tsdf_match_cost_function_2d.cc:
Go to the source code of this file.
Classes | |
| class | cartographer::mapping::scan_matching::TSDFMatchCostFunction2D |
Namespaces | |
| namespace | cartographer |
| namespace | cartographer::mapping |
| namespace | cartographer::mapping::scan_matching |
Functions | |
| ceres::CostFunction * | cartographer::mapping::scan_matching::CreateTSDFMatchCostFunction2D (const double scaling_factor, const sensor::PointCloud &point_cloud, const TSDF2D &tsdf) |