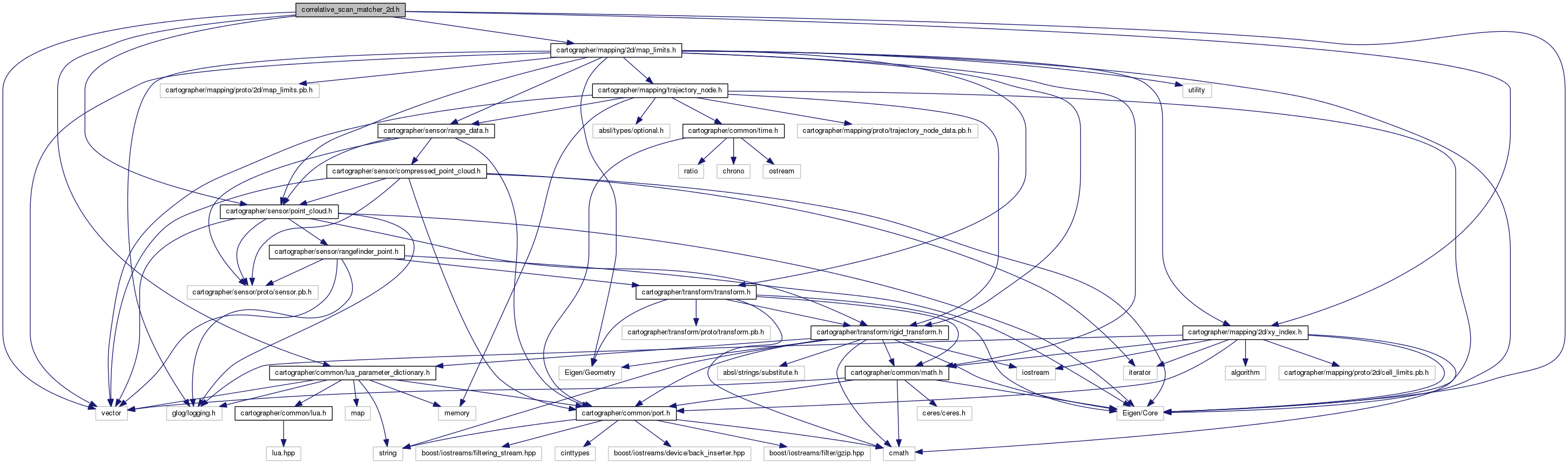
#include <vector>#include "Eigen/Core"#include "cartographer/common/lua_parameter_dictionary.h"#include "cartographer/mapping/2d/map_limits.h"#include "cartographer/mapping/2d/xy_index.h"#include "cartographer/sensor/point_cloud.h"
Include dependency graph for correlative_scan_matcher_2d.h:
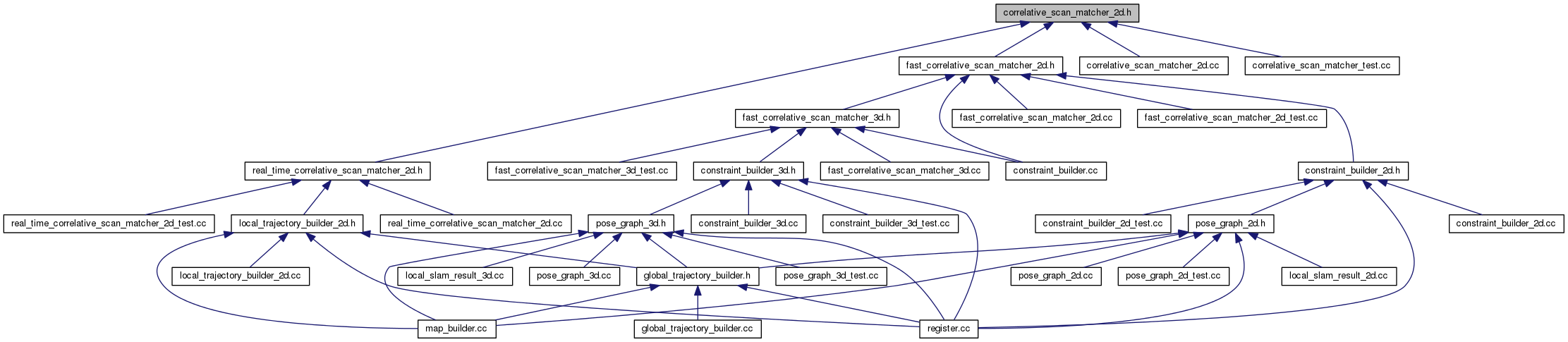
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | cartographer::mapping::scan_matching::Candidate2D |
| struct | cartographer::mapping::scan_matching::SearchParameters::LinearBounds |
| struct | cartographer::mapping::scan_matching::SearchParameters |
Namespaces | |
| namespace | cartographer |
| namespace | cartographer::mapping |
| namespace | cartographer::mapping::scan_matching |
Typedefs | |
| typedef std::vector < Eigen::Array2i > | cartographer::mapping::scan_matching::DiscreteScan2D |
Functions | |
| std::vector< DiscreteScan2D > | cartographer::mapping::scan_matching::DiscretizeScans (const MapLimits &map_limits, const std::vector< sensor::PointCloud > &scans, const Eigen::Translation2f &initial_translation) |
| std::vector< sensor::PointCloud > | cartographer::mapping::scan_matching::GenerateRotatedScans (const sensor::PointCloud &point_cloud, const SearchParameters &search_parameters) |