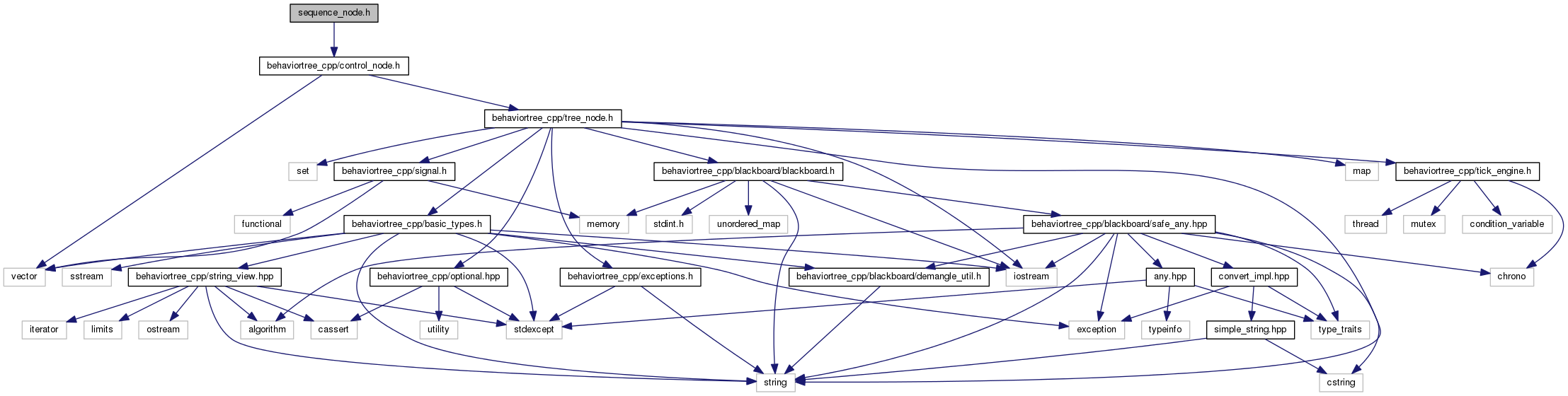
#include "behaviortree_cpp/control_node.h"
Include dependency graph for sequence_node.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | BT::SequenceNode |
| The SequenceNode is used to execute a sequence of children. If any child returns RUNNING, previous children will be ticked again. More... | |
Namespaces | |
| namespace | BT |