Public Member Functions | |
| def | __init__ |
| Constructs a Controller instance. | |
| def | getPosition |
| def | setSpeed |
| def | shutdown |
| Stop the controller, do any hardware shutdown needed. | |
| def | startup |
| Start the controller, do any hardware setup needed. | |
| def | zeroCb |
| def | zeroEncoder |
Public Attributes | |
| a | |
| b | |
| delta | |
| joint | |
| last | |
| last_reading | |
| next | |
| p | |
| pause | |
Static Public Attributes | |
| int | DIRECTION = 102 |
| int | POSITION_H = 101 |
| int | POSITION_L = 100 |
Detailed Description
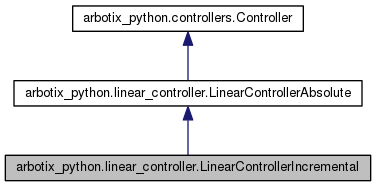
A controller for a linear actuator, without absolute encoder.
Definition at line 214 of file linear_controller.py.
Constructor & Destructor Documentation
| def arbotix_python.linear_controller.LinearControllerIncremental.__init__ | ( | self, | |
| device, | |||
| name | |||
| ) |
Constructs a Controller instance.
- Parameters:
-
device The arbotix instance. name The controller name.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Member Function Documentation
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 255 of file linear_controller.py.
| def arbotix_python.linear_controller.LinearControllerIncremental.setSpeed | ( | self, | |
| speed | |||
| ) |
Set speed of actuator. We need to set direction for encoder.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 242 of file linear_controller.py.
Stop the controller, do any hardware shutdown needed.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 282 of file linear_controller.py.
Start the controller, do any hardware setup needed.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 238 of file linear_controller.py.
| def arbotix_python.linear_controller.LinearControllerIncremental.zeroCb | ( | self, | |
| msg | |||
| ) |
Definition at line 277 of file linear_controller.py.
| def arbotix_python.linear_controller.LinearControllerIncremental.zeroEncoder | ( | self, | |
timeout = 15.0 |
|||
| ) |
Definition at line 258 of file linear_controller.py.
Member Data Documentation
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
int arbotix_python::linear_controller.LinearControllerIncremental::DIRECTION = 102 [static] |
Definition at line 218 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.linear_controller.LinearControllerAbsolute.
Definition at line 220 of file linear_controller.py.
Reimplemented from arbotix_python.controllers.Controller.
Definition at line 220 of file linear_controller.py.
int arbotix_python::linear_controller.LinearControllerIncremental::POSITION_H = 101 [static] |
Definition at line 217 of file linear_controller.py.
int arbotix_python::linear_controller.LinearControllerIncremental::POSITION_L = 100 [static] |
Definition at line 216 of file linear_controller.py.
The documentation for this class was generated from the following file: