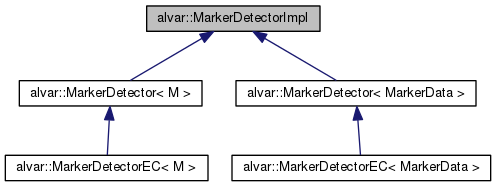
Templateless version of MarkerDetector. Please use MarkerDetector instead. More...
#include <MarkerDetector.h>
Public Member Functions | |
| int | Detect (IplImage *image, Camera *cam, bool track=false, bool visualize=false, double max_new_marker_error=0.08, double max_track_error=0.2, LabelingMethod labeling_method=CVSEQ, bool update_pose=true) |
| Detect Marker 's from image | |
| int | DetectAdditional (IplImage *image, Camera *cam, bool visualize=false, double max_track_error=0.2) |
| void | SetMarkerSize (double _edge_length=1, int _res=5, double _margin=2) |
| void | SetMarkerSizeForId (unsigned long id, double _edge_length=1) |
| void | SetOptions (bool _detect_pose_grayscale=false) |
| void | TrackMarkerAdd (int id, PointDouble corners[4]) |
| Add markers to be tracked Sometimes application or e.g. the MultiMarker implementation knows more about marker locations. Then this method can be used after Detect to indicate where additional trackable markers could be found. The DetectAdditional is called for tracking these. | |
| void | TrackMarkersReset () |
| Clear the markers that are tracked. | |
Protected Member Functions | |
| virtual void | _markers_clear ()=0 |
| virtual void | _markers_push_back (Marker *mn)=0 |
| virtual size_t | _markers_size ()=0 |
| virtual void | _swap_marker_tables ()=0 |
| virtual Marker * | _track_markers_at (size_t i)=0 |
| virtual void | _track_markers_clear ()=0 |
| virtual void | _track_markers_push_back (Marker *mn)=0 |
| virtual size_t | _track_markers_size ()=0 |
| MarkerDetectorImpl () | |
| virtual Marker * | new_M (double _edge_length=0, int _res=0, double _margin=0)=0 |
| virtual | ~MarkerDetectorImpl () |
Protected Attributes | |
| bool | detect_pose_grayscale |
| double | edge_length |
| Labeling * | labeling |
| std::map< unsigned long, double > | map_edge_length |
| double | margin |
| int | res |
Detailed Description
Templateless version of MarkerDetector. Please use MarkerDetector instead.
Definition at line 54 of file MarkerDetector.h.
Constructor & Destructor Documentation
| alvar::MarkerDetectorImpl::MarkerDetectorImpl | ( | ) | [protected] |
Definition at line 33 of file MarkerDetector.cpp.
| alvar::MarkerDetectorImpl::~MarkerDetectorImpl | ( | ) | [protected, virtual] |
Definition at line 39 of file MarkerDetector.cpp.
Member Function Documentation
| virtual void alvar::MarkerDetectorImpl::_markers_clear | ( | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual void alvar::MarkerDetectorImpl::_markers_push_back | ( | Marker * | mn | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual size_t alvar::MarkerDetectorImpl::_markers_size | ( | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual void alvar::MarkerDetectorImpl::_swap_marker_tables | ( | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual Marker* alvar::MarkerDetectorImpl::_track_markers_at | ( | size_t | i | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual void alvar::MarkerDetectorImpl::_track_markers_clear | ( | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual void alvar::MarkerDetectorImpl::_track_markers_push_back | ( | Marker * | mn | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| virtual size_t alvar::MarkerDetectorImpl::_track_markers_size | ( | ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| int alvar::MarkerDetectorImpl::Detect | ( | IplImage * | image, |
| Camera * | cam, | ||
| bool | track = false, |
||
| bool | visualize = false, |
||
| double | max_new_marker_error = 0.08, |
||
| double | max_track_error = 0.2, |
||
| LabelingMethod | labeling_method = CVSEQ, |
||
| bool | update_pose = true |
||
| ) |
Detect Marker 's from image
The coordinates are little tricky. Here is a short summary.
- Image (top-left origin).
- The marker corners in the image are searched in sub-pixel accuracy in counter-clockwise order starting from "lower-left" corner.
- The corresponding marker corners and marker points are in marker coordinates (x is to east, y is to north, and z is up from the marker)
- The marker points are read from inside the margins starting from top-left and reading the bits first left-to-right one line at a time.
- Examples:
- SampleMarkerDetector.cpp, SampleMarkerHide.cpp, SampleMultiMarker.cpp, and SampleMultiMarkerBundle.cpp.
Definition at line 78 of file MarkerDetector.cpp.
| int alvar::MarkerDetectorImpl::DetectAdditional | ( | IplImage * | image, |
| Camera * | cam, | ||
| bool | visualize = false, |
||
| double | max_track_error = 0.2 |
||
| ) |
- Examples:
- SampleMultiMarker.cpp, and SampleMultiMarkerBundle.cpp.
Definition at line 168 of file MarkerDetector.cpp.
| virtual Marker* alvar::MarkerDetectorImpl::new_M | ( | double | _edge_length = 0, |
| int | _res = 0, |
||
| double | _margin = 0 |
||
| ) | [protected, pure virtual] |
Implemented in alvar::MarkerDetector< M >, and alvar::MarkerDetector< MarkerData >.
| void alvar::MarkerDetectorImpl::SetMarkerSize | ( | double | _edge_length = 1, |
| int | _res = 5, |
||
| double | _margin = 2 |
||
| ) |
Set the default marker size to be used for all markers unless
- Parameters:
-
_edge_length Length of the marker's edge in whatever units you are using (e.g. cm) _res The marker content resolution in pixels. By default we use 5x5 markers. If you use 0 with MarkerData, the marker resolution is detected automatically. _margin The marker margin resolution in pixels (The actual captured marker image has pixel resolution of _margin+_res+_margin)
- Note:
- The default marker content resolution (_res) of 5 can only detect marker ids from 0 to 255. For larger marker ids, you need to increase the marker content resolution accordingly.
- Examples:
- SampleMarkerDetector.cpp, SampleMultiMarker.cpp, and SampleMultiMarkerBundle.cpp.
Definition at line 63 of file MarkerDetector.cpp.
| void alvar::MarkerDetectorImpl::SetMarkerSizeForId | ( | unsigned long | id, |
| double | _edge_length = 1 |
||
| ) |
Set marker size for specified marker id. This needs to be called after setting the default marker size.
- Parameters:
-
id The specified marker id _edge_length Length of the marker's edge in whatever units you are using (e.g. cm)
- Examples:
- SampleMultiMarker.cpp.
Definition at line 70 of file MarkerDetector.cpp.
| void alvar::MarkerDetectorImpl::SetOptions | ( | bool | _detect_pose_grayscale = false | ) |
Set marker size for specified marker id. This needs to be called after setting the default marker size.
- Parameters:
-
_detect_pose_grayscale Do we detect marker pose using grayscale optimization?
Definition at line 74 of file MarkerDetector.cpp.
| void alvar::MarkerDetectorImpl::TrackMarkerAdd | ( | int | id, |
| PointDouble | corners[4] | ||
| ) |
Add markers to be tracked Sometimes application or e.g. the MultiMarker implementation knows more about marker locations. Then this method can be used after Detect to indicate where additional trackable markers could be found. The DetectAdditional is called for tracking these.
Definition at line 47 of file MarkerDetector.cpp.
Clear the markers that are tracked.
Definition at line 43 of file MarkerDetector.cpp.
Member Data Documentation
bool alvar::MarkerDetectorImpl::detect_pose_grayscale [protected] |
Definition at line 72 of file MarkerDetector.h.
double alvar::MarkerDetectorImpl::edge_length [protected] |
Definition at line 69 of file MarkerDetector.h.
Labeling* alvar::MarkerDetectorImpl::labeling [protected] |
Definition at line 66 of file MarkerDetector.h.
std::map<unsigned long, double> alvar::MarkerDetectorImpl::map_edge_length [protected] |
Definition at line 68 of file MarkerDetector.h.
double alvar::MarkerDetectorImpl::margin [protected] |
Definition at line 71 of file MarkerDetector.h.
int alvar::MarkerDetectorImpl::res [protected] |
Definition at line 70 of file MarkerDetector.h.
The documentation for this class was generated from the following files: