Provides a Kalman filter for state estimation. More...
#include <kalman_filter.hpp>
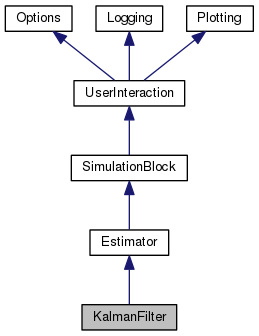
Inheritance diagram for KalmanFilter:
Public Member Functions | |
| virtual Estimator * | clone () const |
| virtual returnValue | init (double startTime=0.0, const DVector &x0_=emptyConstVector, const DVector &p_=emptyConstVector) |
| KalmanFilter (double _samplingTime=DEFAULT_SAMPLING_TIME) | |
| KalmanFilter (const KalmanFilter &rhs) | |
| KalmanFilter & | operator= (const KalmanFilter &rhs) |
| virtual returnValue | step (double currentTime, const DVector &_y) |
| virtual | ~KalmanFilter () |
Detailed Description
Provides a Kalman filter for state estimation.
The class KalmanFilter provides a Kalman filter for state estimation.
Definition at line 53 of file kalman_filter.hpp.
Constructor & Destructor Documentation
| BEGIN_NAMESPACE_ACADO KalmanFilter::KalmanFilter | ( | double | _samplingTime = DEFAULT_SAMPLING_TIME | ) |
Constructor taking minimal sub-block configuration.
Definition at line 46 of file kalman_filter.cpp.
| KalmanFilter::KalmanFilter | ( | const KalmanFilter & | rhs | ) |
Copy constructor (deep copy).
Definition at line 53 of file kalman_filter.cpp.
| KalmanFilter::~KalmanFilter | ( | ) | [virtual] |
Destructor.
Definition at line 58 of file kalman_filter.cpp.
Member Function Documentation
| Estimator * KalmanFilter::clone | ( | ) | const [virtual] |
Implements Estimator.
Definition at line 76 of file kalman_filter.cpp.
| returnValue KalmanFilter::init | ( | double | startTime = 0.0, |
| const DVector & | x0_ = emptyConstVector, |
||
| const DVector & | p_ = emptyConstVector |
||
| ) | [virtual] |
| KalmanFilter & KalmanFilter::operator= | ( | const KalmanFilter & | rhs | ) |
Assignment operator (deep copy).
Definition at line 63 of file kalman_filter.cpp.
| returnValue KalmanFilter::step | ( | double | currentTime, |
| const DVector & | _y | ||
| ) | [virtual] |
The documentation for this class was generated from the following files: