#include <ros/ros.h>#include <geometry_msgs/Twist.h>#include <std_msgs/String.h>#include <sensor_msgs/Joy.h>
Include dependency graph for uos_diffdrive_teleop_cyborgevo.cpp:
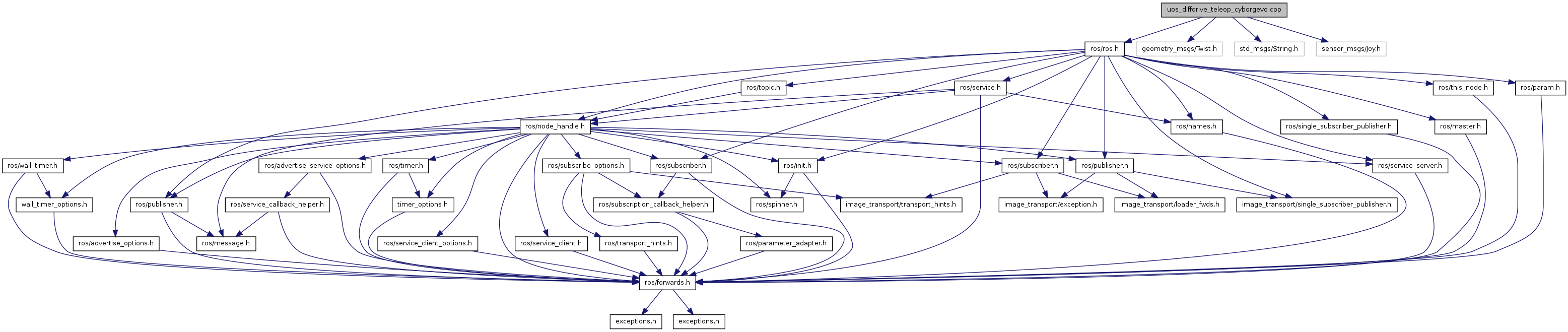
Go to the source code of this file.
Functions | |
| void | cyborgevoCallback (const sensor_msgs::Joy::ConstPtr &joy) |
| int | main (int argc, char **argv) |
Variables | |
| double | max_rotational_vel |
| double | max_vel_x |
| ros::Publisher | req_pub |
| std_msgs::String | request |
| bool | requesting |
| ros::Publisher | vel_pub |
Function Documentation
| void cyborgevoCallback | ( | const sensor_msgs::Joy::ConstPtr & | joy | ) |
Definition at line 13 of file uos_diffdrive_teleop_cyborgevo.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 27 of file uos_diffdrive_teleop_cyborgevo.cpp.
Variable Documentation
| double max_rotational_vel |
Definition at line 6 of file uos_diffdrive_teleop_cyborgevo.cpp.
| double max_vel_x |
Definition at line 6 of file uos_diffdrive_teleop_cyborgevo.cpp.
Definition at line 8 of file uos_diffdrive_teleop_cyborgevo.cpp.
| std_msgs::String request |
Definition at line 9 of file uos_diffdrive_teleop_cyborgevo.cpp.
| bool requesting |
Definition at line 11 of file uos_diffdrive_teleop_cyborgevo.cpp.
Definition at line 7 of file uos_diffdrive_teleop_cyborgevo.cpp.