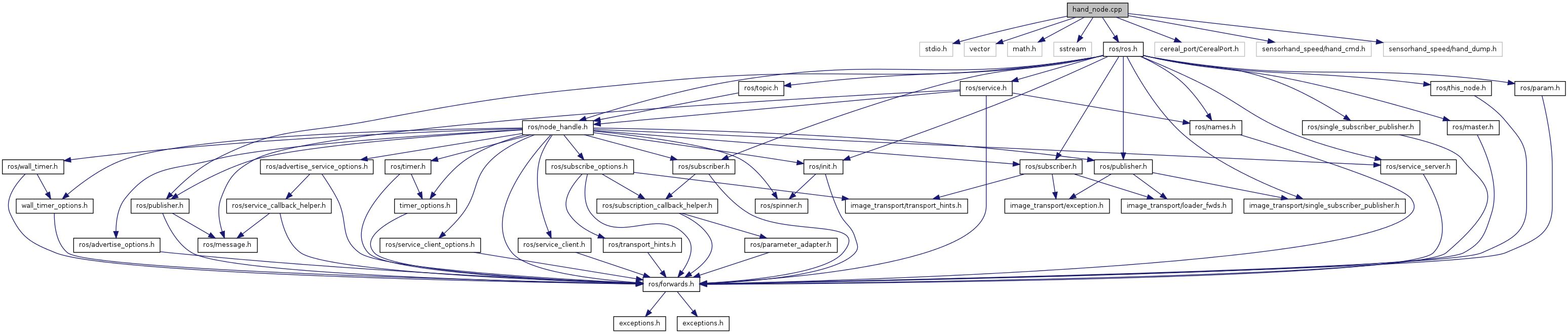
#include <stdio.h>#include <vector>#include <math.h>#include <sstream>#include <ros/ros.h>#include <cereal_port/CerealPort.h>#include "sensorhand_speed/hand_cmd.h"#include "sensorhand_speed/hand_dump.h"
Include dependency graph for hand_node.cpp:
Go to the source code of this file.
Classes | |
| struct | Command |
Defines | |
| #define | TIMEOUT 100 |
Enumerations | |
| enum | Command_id { START_DUMP = 0, STOP_DUMP = 1, OPEN = 2, CLOSE = 3, STOP = 4, GET_SN = 5, RESET = 6, PRGM = 7 } |
| enum | State { IDLE, READ_FIRST, READ_LEN, READ_DATA, READ_CS } |
Functions | |
| int | main (int argc, char **argv) |
| void | publish_dump (ros::Publisher &dump_pub, char *data) |
| bool | readByte (cereal::CerealPort *device, char *data) |
| bool | sendCommand (cereal::CerealPort *device, Command *cmd) |
| bool | srv_callback (sensorhand_speed::hand_cmd::Request &request, sensorhand_speed::hand_cmd::Response &response) |
Variables | |
| bool | dump_mode = false |
| std::vector< Command > | pending_cmd |
| enum State | state |
Define Documentation
| #define TIMEOUT 100 |
Definition at line 43 of file hand_node.cpp.
Enumeration Type Documentation
| enum Command_id |
Definition at line 46 of file hand_node.cpp.
| enum State |
Definition at line 53 of file hand_node.cpp.
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 72 of file hand_node.cpp.
| void publish_dump | ( | ros::Publisher & | dump_pub, |
| char * | data | ||
| ) |
Definition at line 463 of file hand_node.cpp.
| bool readByte | ( | cereal::CerealPort * | device, |
| char * | data | ||
| ) |
Definition at line 266 of file hand_node.cpp.
| bool sendCommand | ( | cereal::CerealPort * | device, |
| Command * | cmd | ||
| ) |
Definition at line 286 of file hand_node.cpp.
| bool srv_callback | ( | sensorhand_speed::hand_cmd::Request & | request, |
| sensorhand_speed::hand_cmd::Response & | response | ||
| ) |
Definition at line 434 of file hand_node.cpp.
Variable Documentation
| bool dump_mode = false |
Definition at line 64 of file hand_node.cpp.
| std::vector<Command> pending_cmd |
Definition at line 63 of file hand_node.cpp.