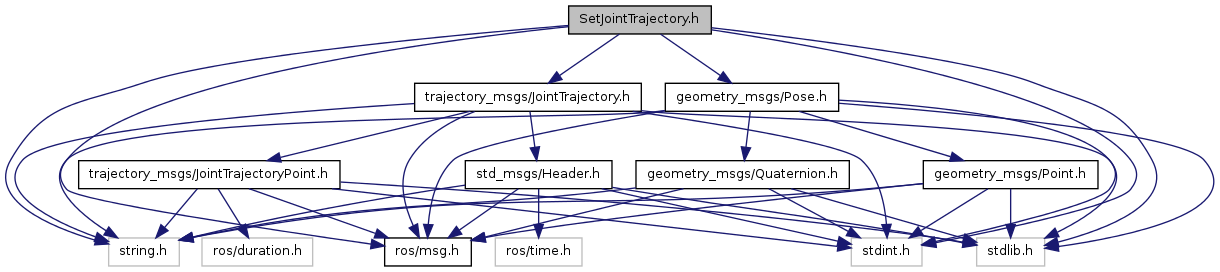
#include <stdint.h>#include <string.h>#include <stdlib.h>#include "ros/msg.h"#include "trajectory_msgs/JointTrajectory.h"#include "geometry_msgs/Pose.h"
Include dependency graph for SetJointTrajectory.h:
Go to the source code of this file.
Classes | |
| class | gazebo_msgs::SetJointTrajectory |
| class | gazebo_msgs::SetJointTrajectoryRequest |
| class | gazebo_msgs::SetJointTrajectoryResponse |
Namespaces | |
| namespace | gazebo_msgs |
Variables | |
| static const char | gazebo_msgs::SETJOINTTRAJECTORY [] = "gazebo_msgs/SetJointTrajectory" |