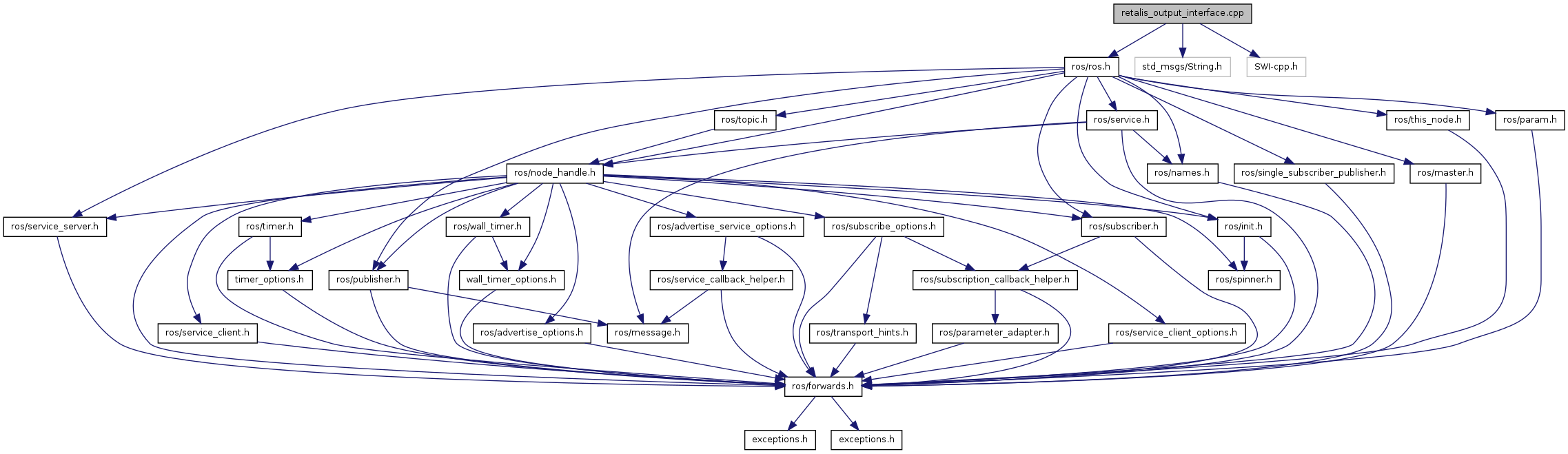
Include dependency graph for retalis_output_interface.cpp:
Go to the source code of this file.
Functions | |
| PREDICATE (retalis_output_initialize, 1) | |
| PREDICATE (output_to_ros, 1) | |
Variables | |
| ros::NodeHandle | n |
| ros::Publisher | outputEventsPub_ |
Function Documentation
| PREDICATE | ( | retalis_output_initialize | , |
| 1 | |||
| ) |
This tutorial demonstrates simple sending of messages over the ROS system.
Definition at line 31 of file retalis_output_interface.cpp.
| PREDICATE | ( | output_to_ros | , |
| 1 | |||
| ) |
Definition at line 38 of file retalis_output_interface.cpp.
Variable Documentation
Definition at line 24 of file retalis_output_interface.cpp.
Definition at line 25 of file retalis_output_interface.cpp.