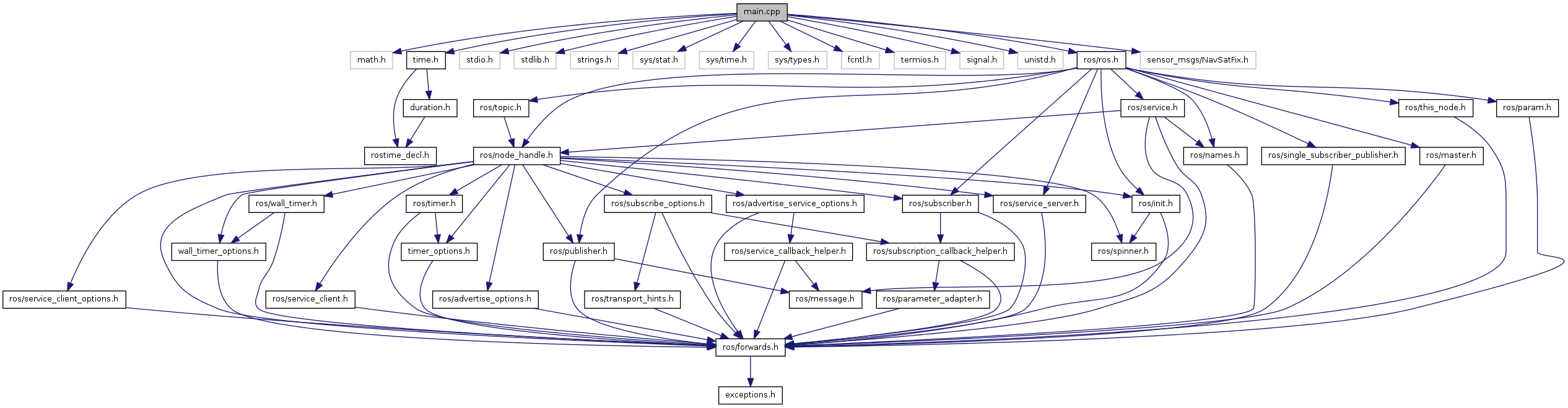
#include <math.h>#include <time.h>#include <stdio.h>#include <stdlib.h>#include <strings.h>#include <sys/stat.h>#include <sys/time.h>#include <sys/types.h>#include <fcntl.h>#include <termios.h>#include <signal.h>#include <unistd.h>#include <ros/ros.h>#include <sensor_msgs/NavSatFix.h>
Include dependency graph for main.cpp:
Go to the source code of this file.
Classes | |
| union | _covL4 |
| union | _covU4 |
Defines | |
| #define | _POSIX_SOURCE 1 |
| #define | BAUDRATE B115200 |
| #define | FALSE 0 |
| #define | NavDataFieldAt 6 |
| #define | TRUE 1 |
Typedefs | |
| typedef union _covL4 | covL4 |
| typedef union _covU4 | covU4 |
Functions | |
| int | main (int argc, char **argv) |
| void | sigproc (int param) |
Variables | |
| int | timetodie = 0 |
| covL4 | uHeightAE |
| covL4 | uHeightASL |
| covU4 | uHoriAccu |
| covL4 | uLatitude |
| covL4 | uLongitude |
| covU4 | uVertAccu |
Define Documentation
| #define _POSIX_SOURCE 1 |
| #define NavDataFieldAt 6 |