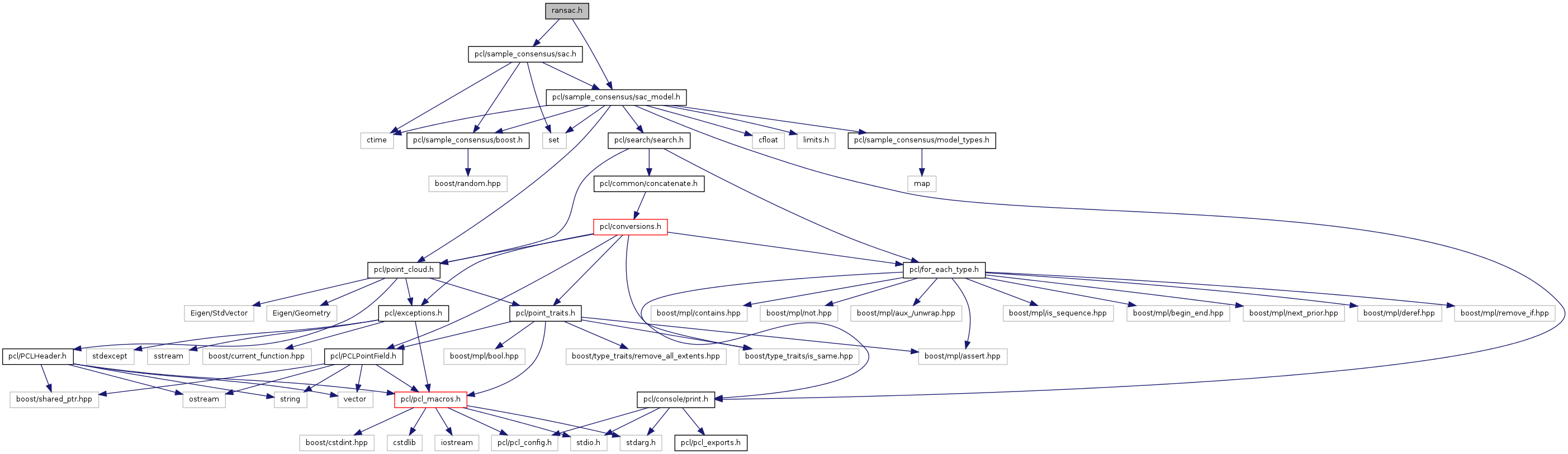
Include dependency graph for ransac.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::RandomSampleConsensus< PointT > |
| RandomSampleConsensus represents an implementation of the RANSAC (RAndom SAmple Consensus) algorithm, as described in: "Random Sample Consensus: A Paradigm for Model Fitting with Applications to Image Analysis and
Automated Cartography", Martin A. Fischler and Robert C. Bolles, Comm. Of the ACM 24: 381–395, June 1981. More... | |
Namespaces | |
| namespace | pcl |