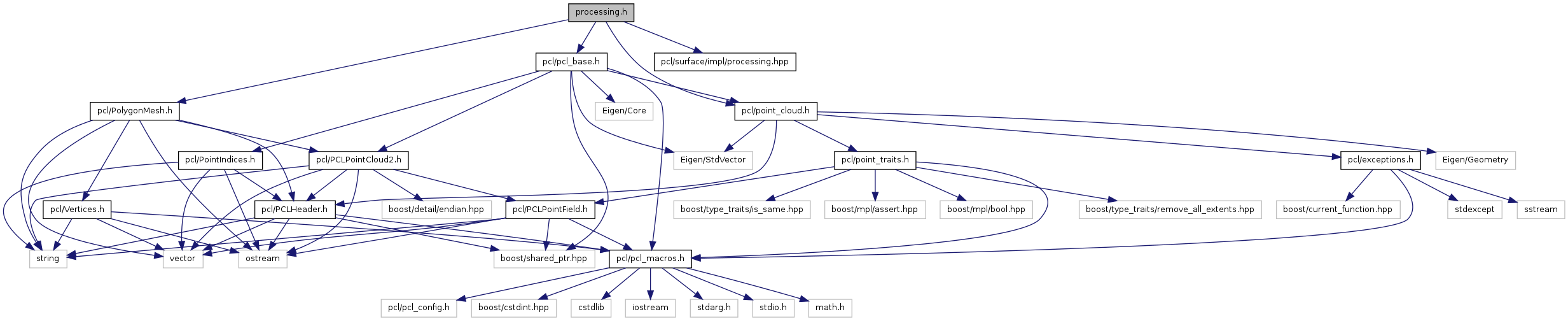
#include <pcl/pcl_base.h>#include <pcl/point_cloud.h>#include <pcl/PolygonMesh.h>#include "pcl/surface/impl/processing.hpp"
Include dependency graph for processing.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::CloudSurfaceProcessing< PointInT, PointOutT > |
| CloudSurfaceProcessing represents the base class for algorithms that takes a point cloud as input and produces a new output cloud that has been modified towards a better surface representation. These types of algorithms include surface smoothing, hole filling, cloud upsampling etc. More... | |
| class | pcl::MeshProcessing |
| MeshProcessing represents the base class for mesh processing algorithms. More... | |
Namespaces | |
| namespace | pcl |