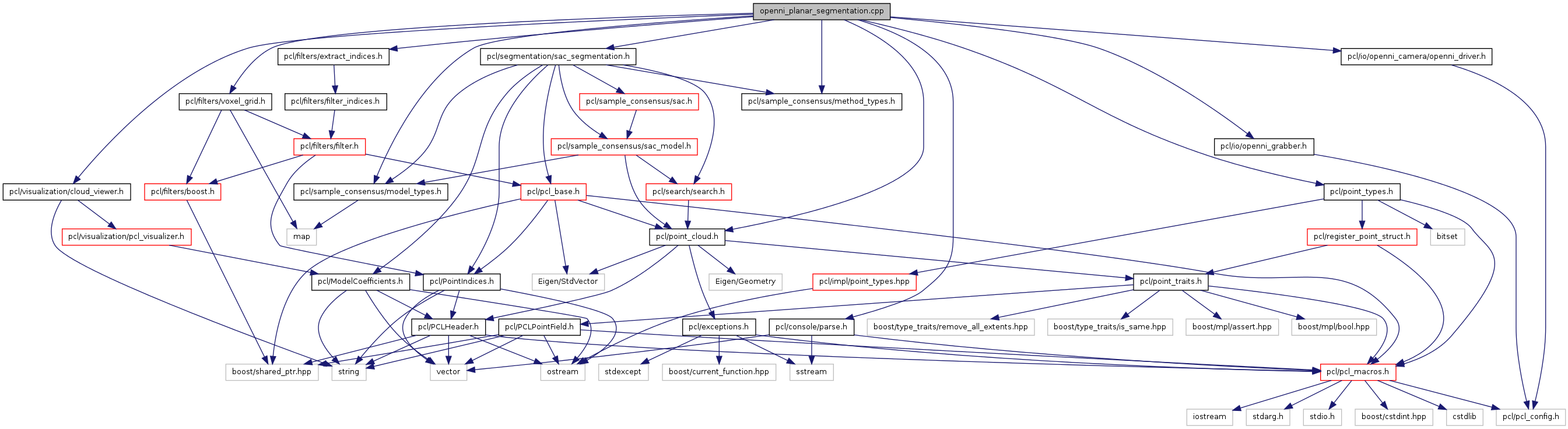
#include <pcl/point_cloud.h>#include <pcl/point_types.h>#include <pcl/io/openni_grabber.h>#include <pcl/visualization/cloud_viewer.h>#include <pcl/io/openni_camera/openni_driver.h>#include <pcl/console/parse.h>#include <pcl/sample_consensus/method_types.h>#include <pcl/sample_consensus/model_types.h>#include <pcl/segmentation/sac_segmentation.h>#include <pcl/filters/voxel_grid.h>#include <pcl/filters/extract_indices.h>
Include dependency graph for openni_planar_segmentation.cpp:
Go to the source code of this file.
Classes | |
| class | OpenNIPlanarSegmentation< PointType > |
Functions | |
| int | main (int argc, char **argv) |
| void | usage (char **argv) |
Function Documentation
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 167 of file openni_planar_segmentation.cpp.
| void usage | ( | char ** | argv | ) |
Definition at line 145 of file openni_planar_segmentation.cpp.