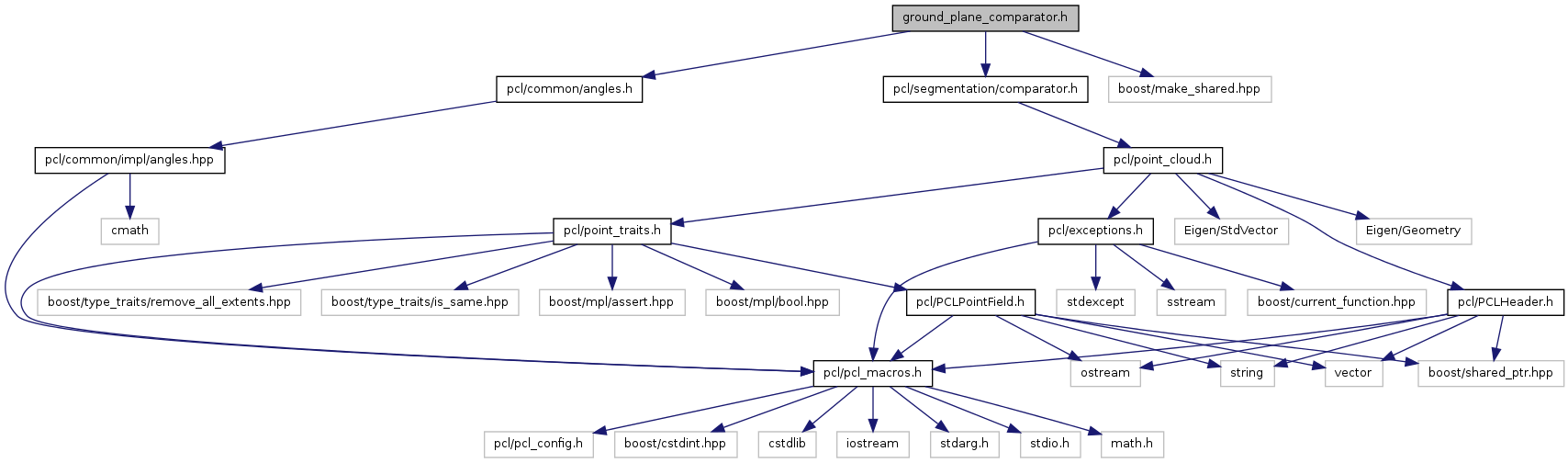
#include <pcl/common/angles.h>#include <pcl/segmentation/comparator.h>#include <boost/make_shared.hpp>
Include dependency graph for ground_plane_comparator.h:
Go to the source code of this file.
Classes | |
| class | pcl::GroundPlaneComparator< PointT, PointNT > |
| GroundPlaneComparator is a Comparator for detecting smooth surfaces suitable for driving. In conjunction with OrganizedConnectedComponentSegmentation, this allows smooth groundplanes / road surfaces to be segmented from point clouds. More... | |
Namespaces | |
| namespace | pcl |