#include <pcl/point_cloud.h>
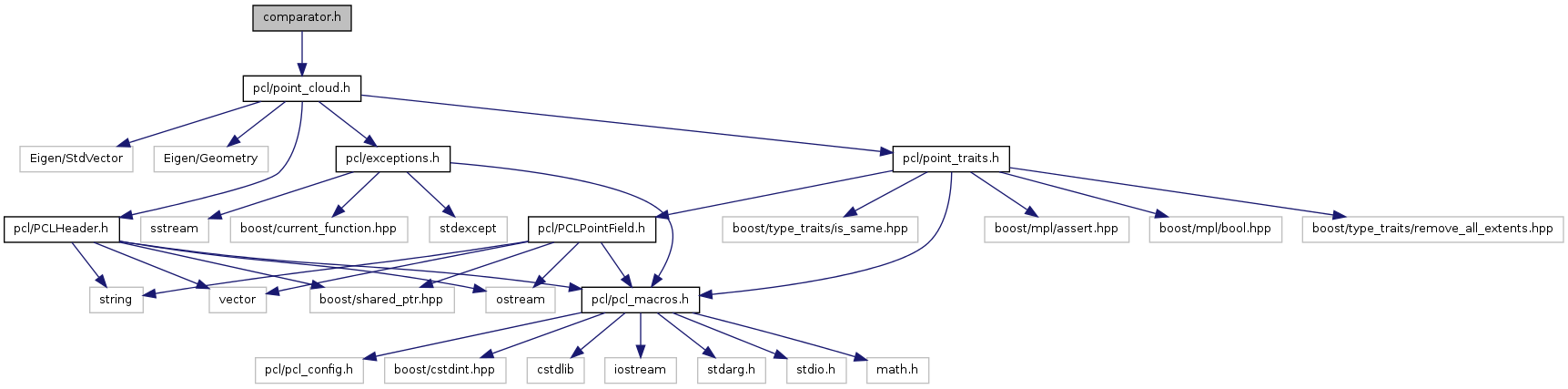
Include dependency graph for comparator.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | pcl::Comparator< PointT > |
| Comparator is the base class for comparators that compare two points given some function. Currently intended for use with OrganizedConnectedComponentSegmentation. More... | |
Namespaces | |
| namespace | pcl |