#include <trimmed_icp.h>
Public Types | |
| typedef Eigen::Matrix< Scalar, 4, 4 > | Matrix4 |
| typedef pcl::PointCloud< PointT > | PointCloud |
| typedef PointCloud::ConstPtr | PointCloudConstPtr |
Public Member Functions | |
| void | align (const PointCloud &source_points, int num_source_points_to_use, Matrix4 &guess_and_result) const |
| The method performs trimmed ICP, i.e., it rigidly registers the source to the target (passed to the init() method). | |
| void | init (const PointCloudConstPtr &target) |
| Call this method before calling align(). | |
| void | setNewToOldEnergyRatio (float ratio) |
| TrimmedICP () | |
| virtual | ~TrimmedICP () |
Static Protected Member Functions | |
| static bool | compareCorrespondences (const pcl::Correspondence &a, const pcl::Correspondence &b) |
Protected Attributes | |
| pcl::KdTreeFLANN< PointT > | kdtree_ |
| float | new_to_old_energy_ratio_ |
| PointCloudConstPtr | target_points_ |
Detailed Description
template<typename PointT, typename Scalar>
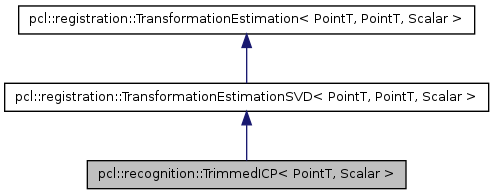
class pcl::recognition::TrimmedICP< PointT, Scalar >
Definition at line 62 of file trimmed_icp.h.
Member Typedef Documentation
| typedef Eigen::Matrix<Scalar, 4, 4> pcl::recognition::TrimmedICP< PointT, Scalar >::Matrix4 |
Reimplemented from pcl::registration::TransformationEstimationSVD< PointT, PointT, Scalar >.
Definition at line 68 of file trimmed_icp.h.
| typedef pcl::PointCloud<PointT> pcl::recognition::TrimmedICP< PointT, Scalar >::PointCloud |
Definition at line 65 of file trimmed_icp.h.
| typedef PointCloud::ConstPtr pcl::recognition::TrimmedICP< PointT, Scalar >::PointCloudConstPtr |
Definition at line 66 of file trimmed_icp.h.
Constructor & Destructor Documentation
| pcl::recognition::TrimmedICP< PointT, Scalar >::TrimmedICP | ( | ) | [inline] |
Definition at line 71 of file trimmed_icp.h.
| virtual pcl::recognition::TrimmedICP< PointT, Scalar >::~TrimmedICP | ( | ) | [inline, virtual] |
Definition at line 75 of file trimmed_icp.h.
Member Function Documentation
| void pcl::recognition::TrimmedICP< PointT, Scalar >::align | ( | const PointCloud & | source_points, |
| int | num_source_points_to_use, | ||
| Matrix4 & | guess_and_result | ||
| ) | const [inline] |
The method performs trimmed ICP, i.e., it rigidly registers the source to the target (passed to the init() method).
- Parameters:
-
[in] source_points is the point cloud to be registered to the target. [in] num_source_points_to_use gives the number of closest source points taken into account for registration. By closest source points we mean the source points closest to the target. These points are computed anew at each iteration. [in,out] guess_and_result is the estimated rigid transform. IMPORTANT: this matrix is also taken as the initial guess for the alignment. If there is no guess, set the matrix to identity!
Definition at line 99 of file trimmed_icp.h.
| static bool pcl::recognition::TrimmedICP< PointT, Scalar >::compareCorrespondences | ( | const pcl::Correspondence & | a, |
| const pcl::Correspondence & | b | ||
| ) | [inline, static, protected] |
Definition at line 173 of file trimmed_icp.h.
| void pcl::recognition::TrimmedICP< PointT, Scalar >::init | ( | const PointCloudConstPtr & | target | ) | [inline] |
Call this method before calling align().
- Parameters:
-
[in] target is target point cloud. The method builds a kd-tree based on 'target' for performing fast closest point search. The source point cloud will be registered to 'target' (see align() method).
Definition at line 84 of file trimmed_icp.h.
| void pcl::recognition::TrimmedICP< PointT, Scalar >::setNewToOldEnergyRatio | ( | float | ratio | ) | [inline] |
Definition at line 163 of file trimmed_icp.h.
Member Data Documentation
pcl::KdTreeFLANN<PointT> pcl::recognition::TrimmedICP< PointT, Scalar >::kdtree_ [protected] |
Definition at line 180 of file trimmed_icp.h.
float pcl::recognition::TrimmedICP< PointT, Scalar >::new_to_old_energy_ratio_ [protected] |
Definition at line 181 of file trimmed_icp.h.
PointCloudConstPtr pcl::recognition::TrimmedICP< PointT, Scalar >::target_points_ [protected] |
Definition at line 179 of file trimmed_icp.h.
The documentation for this class was generated from the following file: