SHOTLocalReferenceFrameEstimation estimates the Local Reference Frame used in the calculation of the (SHOT) descriptor. More...
#include <shot_lrf_omp.h>
Public Types | |
| typedef boost::shared_ptr < const SHOTLocalReferenceFrameEstimationOMP < PointInT, PointOutT > > | ConstPtr |
| typedef boost::shared_ptr < SHOTLocalReferenceFrameEstimationOMP < PointInT, PointOutT > > | Ptr |
Public Member Functions | |
| void | setNumberOfThreads (unsigned int nr_threads=0) |
| Initialize the scheduler and set the number of threads to use. | |
| SHOTLocalReferenceFrameEstimationOMP () | |
| Constructor. | |
| virtual | ~SHOTLocalReferenceFrameEstimationOMP () |
| Empty destructor. | |
Protected Types | |
| typedef Feature< PointInT, PointOutT >::PointCloudIn | PointCloudIn |
| typedef Feature< PointInT, PointOutT >::PointCloudOut | PointCloudOut |
Protected Member Functions | |
| virtual void | computeFeature (PointCloudOut &output) |
| Feature estimation method. | |
Protected Attributes | |
| unsigned int | threads_ |
| The number of threads the scheduler should use. | |
Detailed Description
template<typename PointInT, typename PointOutT = ReferenceFrame>
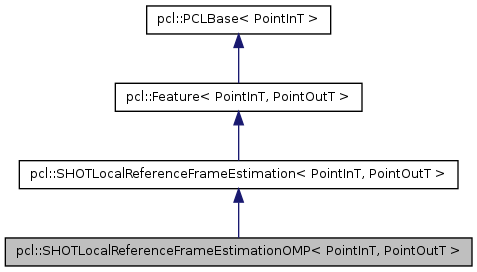
class pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >
SHOTLocalReferenceFrameEstimation estimates the Local Reference Frame used in the calculation of the (SHOT) descriptor.
- Note:
- If you use this code in any academic work, please cite:
- F. Tombari, S. Salti, L. Di Stefano Unique Signatures of Histograms for Local Surface Description. In Proceedings of the 11th European Conference on Computer Vision (ECCV), Heraklion, Greece, September 5-11 2010.
- F. Tombari, S. Salti, L. Di Stefano A Combined Texture-Shape Descriptor For Enhanced 3D Feature Matching. In Proceedings of the 18th International Conference on Image Processing (ICIP), Brussels, Belgium, September 11-14 2011.
Definition at line 67 of file shot_lrf_omp.h.
Member Typedef Documentation
| typedef boost::shared_ptr<const SHOTLocalReferenceFrameEstimationOMP<PointInT, PointOutT> > pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::ConstPtr |
Reimplemented from pcl::SHOTLocalReferenceFrameEstimation< PointInT, PointOutT >.
Definition at line 71 of file shot_lrf_omp.h.
typedef Feature<PointInT, PointOutT>::PointCloudIn pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::PointCloudIn [protected] |
Reimplemented from pcl::SHOTLocalReferenceFrameEstimation< PointInT, PointOutT >.
Definition at line 97 of file shot_lrf_omp.h.
typedef Feature<PointInT, PointOutT>::PointCloudOut pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::PointCloudOut [protected] |
Reimplemented from pcl::SHOTLocalReferenceFrameEstimation< PointInT, PointOutT >.
Definition at line 98 of file shot_lrf_omp.h.
| typedef boost::shared_ptr<SHOTLocalReferenceFrameEstimationOMP<PointInT, PointOutT> > pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::Ptr |
Reimplemented from pcl::SHOTLocalReferenceFrameEstimation< PointInT, PointOutT >.
Definition at line 70 of file shot_lrf_omp.h.
Constructor & Destructor Documentation
| pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::SHOTLocalReferenceFrameEstimationOMP | ( | ) | [inline] |
Constructor.
Definition at line 73 of file shot_lrf_omp.h.
| virtual pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::~SHOTLocalReferenceFrameEstimationOMP | ( | ) | [inline, virtual] |
Empty destructor.
Definition at line 79 of file shot_lrf_omp.h.
Member Function Documentation
| void pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::computeFeature | ( | PointCloudOut & | output | ) | [protected, virtual] |
Feature estimation method.
- Parameters:
-
[out] output the resultant features
Reimplemented from pcl::SHOTLocalReferenceFrameEstimation< PointInT, PointOutT >.
Definition at line 49 of file shot_lrf_omp.hpp.
| void pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::setNumberOfThreads | ( | unsigned int | nr_threads = 0 | ) | [inline] |
Initialize the scheduler and set the number of threads to use.
- Parameters:
-
nr_threads the number of hardware threads to use (0 sets the value back to automatic)
Definition at line 85 of file shot_lrf_omp.h.
Member Data Documentation
unsigned int pcl::SHOTLocalReferenceFrameEstimationOMP< PointInT, PointOutT >::threads_ [protected] |
The number of threads the scheduler should use.
Definition at line 107 of file shot_lrf_omp.h.
The documentation for this class was generated from the following files: