Implementation of a fast bilateral filter for smoothing depth information in organized point clouds Based on the following paper: * Sylvain Paris and Frdo Durand "A Fast Approximation of the Bilateral Filter using a Signal Processing Approach" European Conference on Computer Vision (ECCV'06) More...
#include <fast_bilateral_omp.h>
Public Types | |
| typedef boost::shared_ptr < const FastBilateralFilterOMP < PointT > > | ConstPtr |
| typedef boost::shared_ptr < FastBilateralFilterOMP < PointT > > | Ptr |
Public Member Functions | |
| void | applyFilter (PointCloud &output) |
| Filter the input data and store the results into output. | |
| FastBilateralFilterOMP (unsigned int nr_threads=0) | |
| Empty constructor. | |
| void | setNumberOfThreads (unsigned int nr_threads=0) |
| Initialize the scheduler and set the number of threads to use. | |
Protected Types | |
| typedef FastBilateralFilter < PointT >::Array3D | Array3D |
| typedef Filter< PointT > ::PointCloud | PointCloud |
Protected Attributes | |
| unsigned int | threads_ |
| The number of threads the scheduler should use. | |
Detailed Description
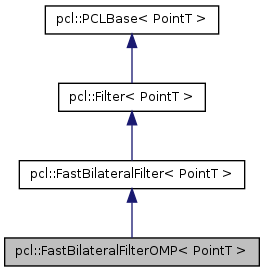
template<typename PointT>
class pcl::FastBilateralFilterOMP< PointT >
Implementation of a fast bilateral filter for smoothing depth information in organized point clouds Based on the following paper: * Sylvain Paris and Frdo Durand "A Fast Approximation of the Bilateral Filter using a Signal Processing Approach" European Conference on Computer Vision (ECCV'06)
More details on the webpage: http://people.csail.mit.edu/sparis/bf/
Definition at line 59 of file fast_bilateral_omp.h.
Member Typedef Documentation
typedef FastBilateralFilter<PointT>::Array3D pcl::FastBilateralFilterOMP< PointT >::Array3D [protected] |
Definition at line 66 of file fast_bilateral_omp.h.
| typedef boost::shared_ptr< const FastBilateralFilterOMP<PointT> > pcl::FastBilateralFilterOMP< PointT >::ConstPtr |
Reimplemented from pcl::FastBilateralFilter< PointT >.
Definition at line 73 of file fast_bilateral_omp.h.
typedef Filter<PointT>::PointCloud pcl::FastBilateralFilterOMP< PointT >::PointCloud [protected] |
Reimplemented from pcl::FastBilateralFilter< PointT >.
Definition at line 68 of file fast_bilateral_omp.h.
| typedef boost::shared_ptr< FastBilateralFilterOMP<PointT> > pcl::FastBilateralFilterOMP< PointT >::Ptr |
Reimplemented from pcl::FastBilateralFilter< PointT >.
Definition at line 72 of file fast_bilateral_omp.h.
Constructor & Destructor Documentation
| pcl::FastBilateralFilterOMP< PointT >::FastBilateralFilterOMP | ( | unsigned int | nr_threads = 0 | ) | [inline] |
Empty constructor.
Definition at line 76 of file fast_bilateral_omp.h.
Member Function Documentation
| void pcl::FastBilateralFilterOMP< PointT >::applyFilter | ( | PointCloud & | output | ) | [virtual] |
Filter the input data and store the results into output.
- Parameters:
-
[out] output the resultant point cloud
Reimplemented from pcl::FastBilateralFilter< PointT >.
Definition at line 50 of file fast_bilateral_omp.hpp.
| void pcl::FastBilateralFilterOMP< PointT >::setNumberOfThreads | ( | unsigned int | nr_threads = 0 | ) | [inline] |
Initialize the scheduler and set the number of threads to use.
- Parameters:
-
nr_threads the number of hardware threads to use (0 sets the value back to automatic)
Definition at line 84 of file fast_bilateral_omp.h.
Member Data Documentation
unsigned int pcl::FastBilateralFilterOMP< PointT >::threads_ [protected] |
The number of threads the scheduler should use.
Definition at line 94 of file fast_bilateral_omp.h.
The documentation for this class was generated from the following files: