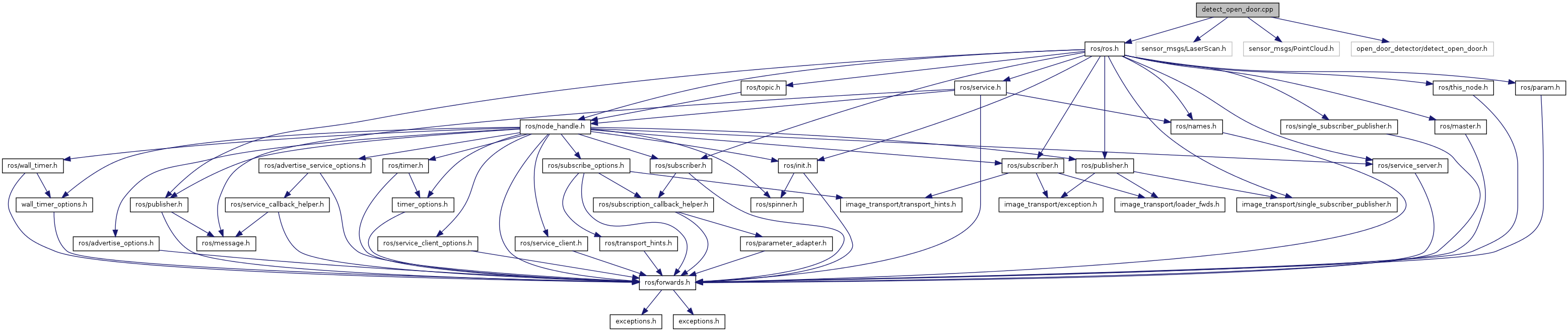
#include "ros/ros.h"#include "sensor_msgs/LaserScan.h"#include "sensor_msgs/PointCloud.h"#include "open_door_detector/detect_open_door.h"
Include dependency graph for detect_open_door.cpp:
Go to the source code of this file.
Functions | |
| bool | detect_door (open_door_detector::detect_open_door::Request &req, open_door_detector::detect_open_door::Response &res) |
| void | laserCallback (const sensor_msgs::LaserScan::ConstPtr &scan_in) |
| int | main (int argc, char **argv) |
Variables | |
| const int | DETECTION_THRESHOLD = 25 |
| sensor_msgs::LaserScan | last_scan_in |
| const float | WALL_DIST_THRESHOLD = 0.2 |
Function Documentation
| bool detect_door | ( | open_door_detector::detect_open_door::Request & | req, |
| open_door_detector::detect_open_door::Response & | res | ||
| ) |
Title: Open Door Detector Author: Reiter Andreas & Reisenberger Johannes Date: 19.12.2013 Summary: Provides a service to detect if a door is open. If this is the case, it returns the position of the middle of the door. Otherwise it returns position 0. Input Arguments: aperture_angle wall_distance
Output Argument: door_pos
Definition at line 42 of file detect_open_door.cpp.
| void laserCallback | ( | const sensor_msgs::LaserScan::ConstPtr & | scan_in | ) |
Definition at line 122 of file detect_open_door.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 29 of file detect_open_door.cpp.
Variable Documentation
| const int DETECTION_THRESHOLD = 25 |
Definition at line 23 of file detect_open_door.cpp.
| sensor_msgs::LaserScan last_scan_in |
Definition at line 27 of file detect_open_door.cpp.
| const float WALL_DIST_THRESHOLD = 0.2 |
Definition at line 24 of file detect_open_door.cpp.