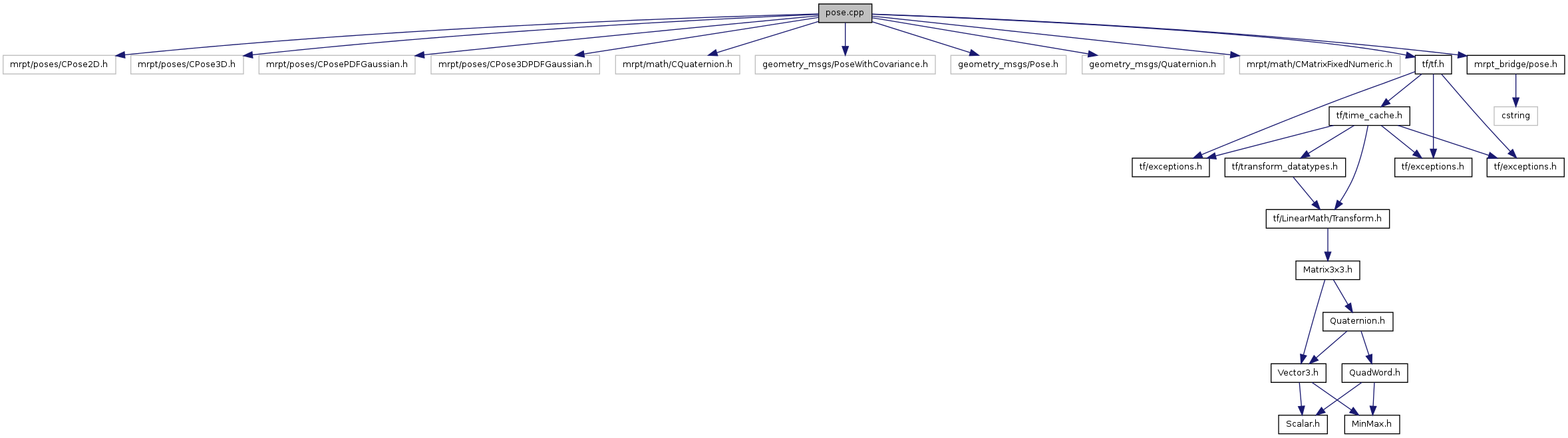
#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPosePDFGaussian.h>#include <mrpt/poses/CPose3DPDFGaussian.h>#include <mrpt/math/CQuaternion.h>#include <geometry_msgs/PoseWithCovariance.h>#include <geometry_msgs/Pose.h>#include <geometry_msgs/Quaternion.h>#include <mrpt/math/CMatrixFixedNumeric.h>#include <tf/tf.h>#include "mrpt_bridge/pose.h"
Include dependency graph for pose.cpp: