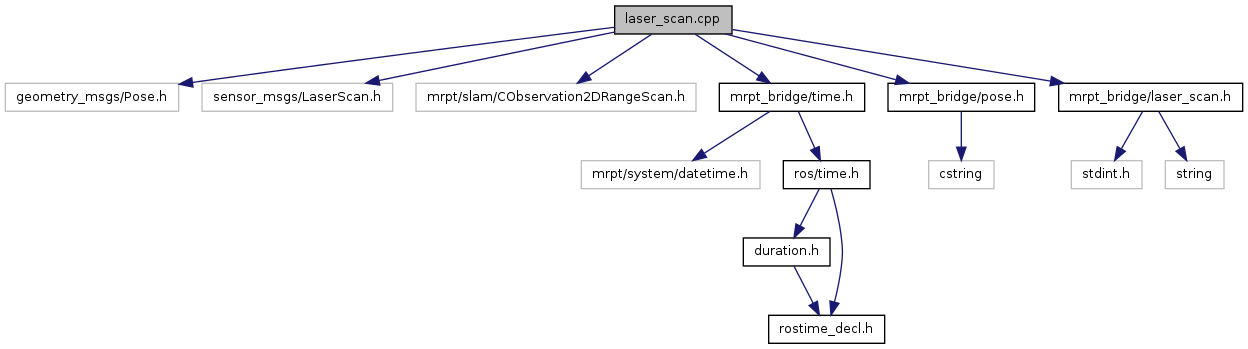
#include <geometry_msgs/Pose.h>#include <sensor_msgs/LaserScan.h>#include <mrpt/slam/CObservation2DRangeScan.h>#include "mrpt_bridge/time.h"#include "mrpt_bridge/pose.h"#include "mrpt_bridge/laser_scan.h"
Include dependency graph for laser_scan.cpp:
Go to the source code of this file.
Namespaces | |
| namespace | mrpt_bridge |
Functions | |
| bool | mrpt_bridge::convert (const sensor_msgs::LaserScan &_msg, const mrpt::poses::CPose3D &_pose, mrpt::slam::CObservation2DRangeScan &_obj) |
| bool | mrpt_bridge::convert (const mrpt::slam::CObservation2DRangeScan &_obj, sensor_msgs::LaserScan &_msg) |
| bool | mrpt_bridge::convert (const mrpt::slam::CObservation2DRangeScan &_obj, sensor_msgs::LaserScan &_msg, geometry_msgs::Pose &_pose) |