#include <control_layer_base.h>
Public Types | |
| enum | CONTROLLER_STATUS { STOPPED, STARTED } |
Public Member Functions | |
| ControlLayerBase (const CONTROLLER_STATUS initial_status=STARTED) | |
| uint32_t | getDecisionEpisode () |
| uint32_t | getDecisionHorizon () |
| CONTROLLER_STATUS | getStatus () |
| virtual void | resetController () |
| void | resetDecisionEpisode () |
| virtual void | startController () |
| virtual void | stopController () |
Protected Member Functions | |
| uint32_t | incrementDecisionEpisode () |
| void | setStatus (const CONTROLLER_STATUS status) |
Protected Attributes | |
| ros::NodeHandle | nh_ |
Private Member Functions | |
| bool | resetCallback (std_srvs::Empty::Request &request, std_srvs::Empty::Response &response) |
| bool | startCallback (std_srvs::Empty::Request &request, std_srvs::Empty::Response &response) |
| bool | stopCallback (std_srvs::Empty::Request &request, std_srvs::Empty::Response &response) |
Private Attributes | |
| uint32_t | decision_episode_ |
| uint32_t | decision_horizon_ |
| ros::ServiceServer | reset_srv_ |
| ros::ServiceServer | start_srv_ |
| CONTROLLER_STATUS | status_ |
| ros::ServiceServer | stop_srv_ |
Detailed Description
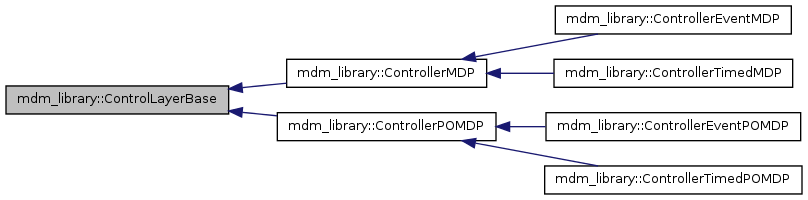
The ControlLayerBase class provides the functionalities that are common to all MDM controllers. These include:
- The ability to stop / start / reset a controller via service calls;
- The ability to get / reset the decision step number of a controller.
Definition at line 56 of file control_layer_base.h.
Member Enumeration Documentation
A simple flag to identify whether a controller is active or not. All controllers should allow external stop / start / reset commands.
Definition at line 63 of file control_layer_base.h.
Constructor & Destructor Documentation
| ControlLayerBase::ControlLayerBase | ( | const CONTROLLER_STATUS | initial_status = STARTED | ) |
Default constructor.
- Parameters:
-
initial_status The initial status of this controller. By default, Control Layers are auto-started. If the initial status is STOPPED, it must be started externally (this is desirable for lower-level controllers in hierarchical systems).
Definition at line 36 of file control_layer_base.cpp.
Member Function Documentation
| uint32_t ControlLayerBase::getDecisionEpisode | ( | ) |
Returns the current decision step number of this controller (mostly for logging purposes).
Definition at line 131 of file control_layer_base.cpp.
| uint32_t ControlLayerBase::getDecisionHorizon | ( | ) |
Returns the horizon of this controller. The MADP-defined MAXHORIZON should be interpreted as infinite.
Definition at line 149 of file control_layer_base.cpp.
Returns the current status of this controller.
Definition at line 140 of file control_layer_base.cpp.
| uint32_t ControlLayerBase::incrementDecisionEpisode | ( | ) | [protected] |
Increments the decision step number. If the step number reaches the problem horizon, the controller is reset.
Definition at line 167 of file control_layer_base.cpp.
| bool ControlLayerBase::resetCallback | ( | std_srvs::Empty::Request & | request, |
| std_srvs::Empty::Response & | response | ||
| ) | [private] |
The callback for the "reset" service (Empty service type).
- See also:
- reset_srv_
Definition at line 79 of file control_layer_base.cpp.
| void ControlLayerBase::resetController | ( | ) | [virtual] |
Stops and re-starts the controller.
- See also:
- stopController(), startController()
This is primarily meant for controllers with reimplemented stop/start functions.
Definition at line 110 of file control_layer_base.cpp.
Resets the decision step number of this controller back to 0.
Definition at line 158 of file control_layer_base.cpp.
| void ControlLayerBase::setStatus | ( | const CONTROLLER_STATUS | status | ) | [protected] |
Allows direct access to the status of this controller. This can be used to reimplement the start / stop / reset functions by derived classes.
Definition at line 121 of file control_layer_base.cpp.
| bool ControlLayerBase::startCallback | ( | std_srvs::Empty::Request & | request, |
| std_srvs::Empty::Response & | response | ||
| ) | [private] |
The callback for the "start" service (Empty service type).
- See also:
- start_srv_
Definition at line 69 of file control_layer_base.cpp.
| void ControlLayerBase::startController | ( | ) | [virtual] |
Start this controller. The decision step number is set to 0 whenever a controller is started.
- See also:
- stopController, resetController()
Reimplemented in mdm_library::ControllerEventPOMDP, and mdm_library::ControllerTimedPOMDP.
Definition at line 100 of file control_layer_base.cpp.
| bool ControlLayerBase::stopCallback | ( | std_srvs::Empty::Request & | request, |
| std_srvs::Empty::Response & | response | ||
| ) | [private] |
The callback for the "stop" service (Empty service type).
- See also:
- stop_srv_
Definition at line 59 of file control_layer_base.cpp.
| void ControlLayerBase::stopController | ( | ) | [virtual] |
Stop this controller. When stopped, a controller does not update internally, not does it output any actions. Be mindful that, for partially observable models, after stopping a controller, you may need to feed the correct initial belief state to the controller before starting it again.
- See also:
- startController(), resetController()
Definition at line 91 of file control_layer_base.cpp.
Member Data Documentation
uint32_t mdm_library::ControlLayerBase::decision_episode_ [private] |
The decision step number.
Definition at line 136 of file control_layer_base.h.
uint32_t mdm_library::ControlLayerBase::decision_horizon_ [private] |
The decision horizon. While, typically, infinite-horizon policies are used for robotic agents, MDM also contemplates the possibility of using finite-horizon controllers.
Definition at line 140 of file control_layer_base.h.
ros::NodeHandle mdm_library::ControlLayerBase::nh_ [protected] |
Definition at line 114 of file control_layer_base.h.
The "reset" service server. This is an empty-type service in the namespace of the node containing the Control Layer, which can be used to reset (stop & start) the controller.
Definition at line 156 of file control_layer_base.h.
The "start" service server. This is an empty-type service in the namespace of the node containing the Control Layer, which can be used to start the controller.
Definition at line 151 of file control_layer_base.h.
The status of this controller.
Definition at line 134 of file control_layer_base.h.
The "stop" service server. This is an empty-type service in the namespace of the node containing the Control Layer, which can be used to stop the controller.
Definition at line 146 of file control_layer_base.h.
The documentation for this class was generated from the following files: