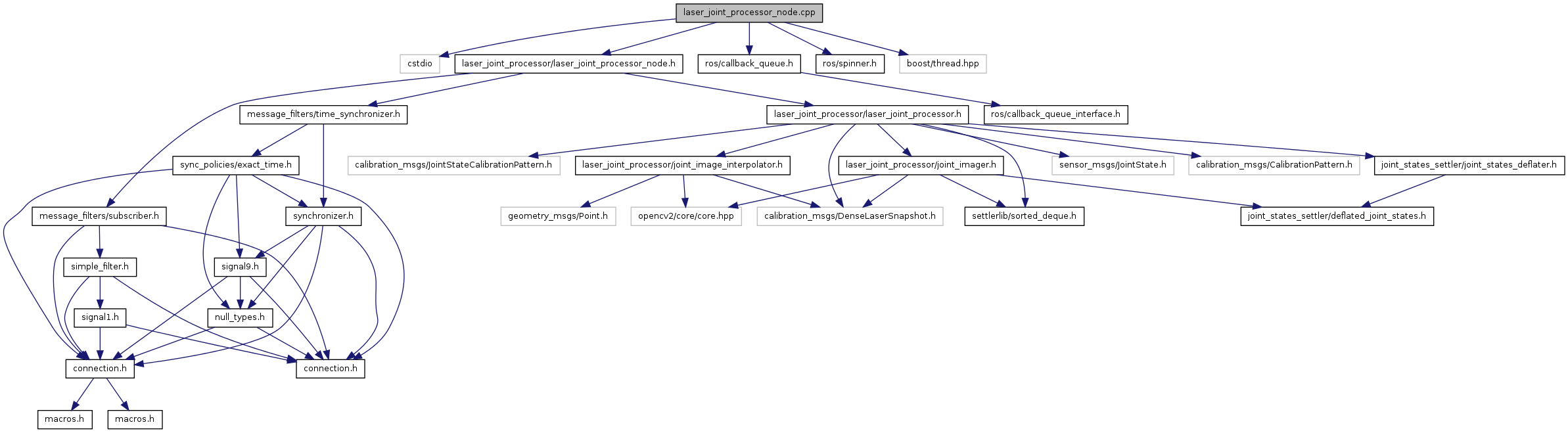
#include <cstdio>#include <laser_joint_processor/laser_joint_processor_node.h>#include <ros/callback_queue.h>#include <ros/spinner.h>#include <boost/thread.hpp>
Include dependency graph for laser_joint_processor_node.cpp:
Go to the source code of this file.
Functions | |
| void | getParamConfig (ros::NodeHandle &nh, vector< string > &joint_names) |
| int | main (int argc, char **argv) |
| void | spinFunc (ros::CallbackQueue *queue) |
Function Documentation
| void getParamConfig | ( | ros::NodeHandle & | nh, |
| vector< string > & | joint_names | ||
| ) |
Definition at line 152 of file laser_joint_processor_node.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 191 of file laser_joint_processor_node.cpp.
| void spinFunc | ( | ros::CallbackQueue * | queue | ) |
Definition at line 181 of file laser_joint_processor_node.cpp.