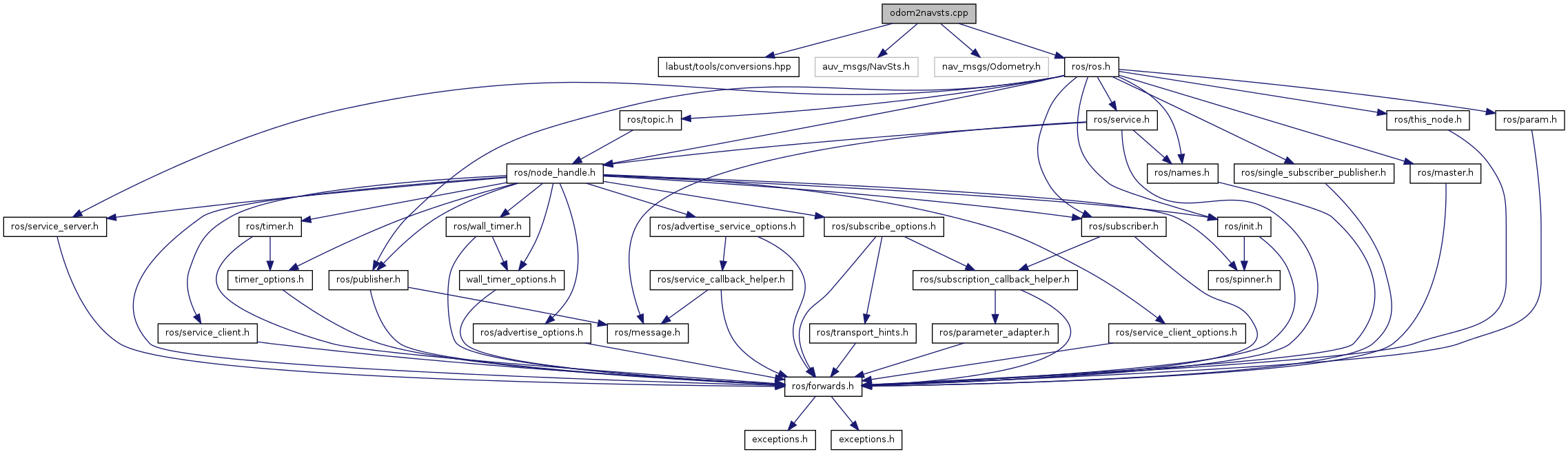
#include <labust/tools/conversions.hpp>#include <auv_msgs/NavSts.h>#include <nav_msgs/Odometry.h>#include <ros/ros.h>
Include dependency graph for odom2navsts.cpp:
Go to the source code of this file.
Functions | |
| int | main (int argc, char *argv[]) |
| void | onNavSts (ros::Publisher &odom, const Eigen::Matrix3d &rot, const auv_msgs::NavSts::ConstPtr &msg) |
Function Documentation
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 72 of file odom2navsts.cpp.
| void onNavSts | ( | ros::Publisher & | odom, |
| const Eigen::Matrix3d & | rot, | ||
| const auv_msgs::NavSts::ConstPtr & | msg | ||
| ) |
Definition at line 44 of file odom2navsts.cpp.