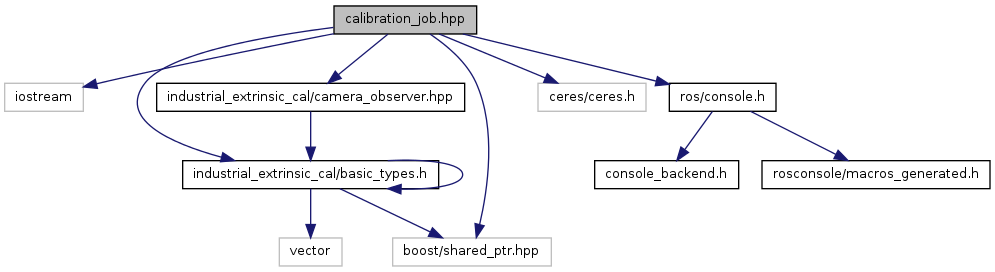
#include <iostream>#include <industrial_extrinsic_cal/basic_types.h>#include <industrial_extrinsic_cal/camera_observer.hpp>#include <boost/shared_ptr.hpp>#include "ceres/ceres.h"#include <ros/console.h>
Include dependency graph for calibration_job.hpp:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | industrial_extrinsic_cal::CalibrationJob |
| defines and exececutes the calibration script More... | |
| class | industrial_extrinsic_cal::Camera |
| a high level camera wraper including its parameters, and its observer More... | |
| class | industrial_extrinsic_cal::CeresBlocks |
| These blocks of data hold the ceres parameters upon which the optimizaition proceeds Static cameras have a block of parameters for their 6Dof Pose they have a block of 4 parameters for pinhole projection model intrinsics they have a block of 10 parameters for their distortion projection intrinsics The 1st 4 parameters of the 10 distortion model are the same variables Moving cameras have identical sets of. More... | |
| struct | industrial_extrinsic_cal::MovingCamera |
| struct | industrial_extrinsic_cal::MovingTarget |
| moving need a new pose with each scene in which they are used More... | |
| struct | industrial_extrinsic_cal::ObservationCmd |
| unique observation command More... | |
| class | industrial_extrinsic_cal::ObservationDataPoint |
| class | industrial_extrinsic_cal::ObservationDataPointList |
| a list of observation data points which allows all the collected information about the observations to be easily submitted to ceres It also allows the problem data to be printed to files for debugging and external analysis More... | |
| class | industrial_extrinsic_cal::ObservationScene |
| a command to take a set of observations from a group of cameras upon a trigger event More... | |
| struct | industrial_extrinsic_cal::Trigger |
| what kind of trigger initiates the collection of data for this scene More... | |
Namespaces | |
| namespace | industrial_extrinsic_cal |
Typedefs | |
| typedef struct industrial_extrinsic_cal::MovingCamera | industrial_extrinsic_cal::MovingCamera |