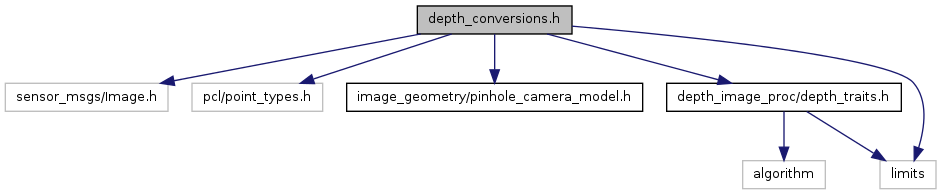
#include <sensor_msgs/Image.h>#include <pcl/point_types.h>#include <image_geometry/pinhole_camera_model.h>#include <depth_image_proc/depth_traits.h>#include <limits>
Include dependency graph for depth_conversions.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | depth_image_proc |
Functions | |
| template<typename T > | |
| void | depth_image_proc::convert (const sensor_msgs::ImageConstPtr &depth_msg, pcl::PointCloud< pcl::PointXYZ >::Ptr &cloud_msg, const image_geometry::PinholeCameraModel &model, double range_max=0.0) |