Allows to export a tailored diagonally implicit Runge-Kutta integrator for fast model predictive control. More...
#include <dirk_export.hpp>
Detailed Description
Allows to export a tailored diagonally implicit Runge-Kutta integrator for fast model predictive control.
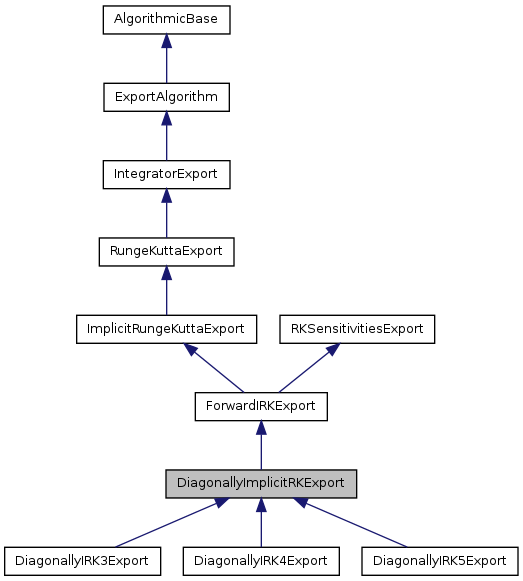
The class DiagonallyImplicitRKExport allows to export a tailored diagonally implicit Runge-Kutta integrator for fast model predictive control.
Definition at line 54 of file dirk_export.hpp.
Constructor & Destructor Documentation
| BEGIN_NAMESPACE_ACADO DiagonallyImplicitRKExport::DiagonallyImplicitRKExport | ( | UserInteraction * | _userInteraction = 0, |
| const std::string & | _commonHeaderName = "" |
||
| ) |
Default constructor.
- Parameters:
-
[in] _userInteraction Pointer to corresponding user interface. [in] _commonHeaderName Name of common header file to be included.
Definition at line 48 of file dirk_export.cpp.
Copy constructor (deep copy).
- Parameters:
-
[in] arg Right-hand side object.
Definition at line 55 of file dirk_export.cpp.
| DiagonallyImplicitRKExport::~DiagonallyImplicitRKExport | ( | ) | [virtual] |
Destructor.
Definition at line 61 of file dirk_export.cpp.
Member Function Documentation
| returnValue DiagonallyImplicitRKExport::evaluateMatrix | ( | ExportStatementBlock * | block, |
| const ExportIndex & | index1, | ||
| const ExportIndex & | index2, | ||
| const ExportIndex & | tmp_index, | ||
| const ExportVariable & | Ah, | ||
| const ExportVariable & | C, | ||
| bool | evaluateB, | ||
| bool | DERIVATIVES | ||
| ) | [virtual] |
Exports the evaluation of the matrix of the linear system.
- Parameters:
-
[in] block The block to which the code will be exported. [in] index1 The loop index of the outer loop. [in] index2 The loop index of the inner loop. [in] tmp_index A temporary index to be used. [in] Ah The matrix A of the IRK method, multiplied by the step size h. [in] evaluateB True if the right-hand side of the linear system should also be evaluated, false otherwise.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 319 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::evaluateRhsImplicitSystem | ( | ExportStatementBlock * | block, |
| const ExportIndex & | stage | ||
| ) | [virtual] |
Exports the evaluation of the right-hand side of the linear system at a specific stage.
- Parameters:
-
[in] block The block to which the code will be exported. [in] index The loop index, defining the stage.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 375 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::evaluateStatesImplicitSystem | ( | ExportStatementBlock * | block, |
| const ExportVariable & | Ah, | ||
| const ExportVariable & | C, | ||
| const ExportIndex & | stage, | ||
| const ExportIndex & | i, | ||
| const ExportIndex & | j | ||
| ) | [virtual] |
Exports the evaluation of the states at a specific stage.
- Parameters:
-
[in] block The block to which the code will be exported. [in] Ah The matrix A of the IRK method, multiplied by the step size h. [in] index The loop index, defining the stage.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 350 of file dirk_export.cpp.
| DMatrix DiagonallyImplicitRKExport::formMatrix | ( | const DMatrix & | mass, |
| const DMatrix & | jacobian | ||
| ) | [virtual] |
Forms a constant linear system matrix for the collocation equations, given a constant jacobian and mass matrix.
- Parameters:
-
[in] jacobian given constant Jacobian matrix [in] mass given constant mass matrix
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 163 of file dirk_export.cpp.
| DiagonallyImplicitRKExport & DiagonallyImplicitRKExport::operator= | ( | const DiagonallyImplicitRKExport & | arg | ) |
Assignment operator (deep copy).
- Parameters:
-
[in] arg Right-hand side object.
Definition at line 71 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::prepareInputSystem | ( | ExportStatementBlock & | code | ) | [virtual] |
Precompute as much as possible for the linear input system and export the resulting definitions.
- Parameters:
-
[in] code The block to which the code will be exported.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ForwardIRKExport.
Definition at line 107 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::prepareOutputSystem | ( | ExportStatementBlock & | code | ) | [virtual] |
Precompute as much as possible for the linear output system and export the resulting definitions.
- Parameters:
-
[in] code The block to which the code will be exported.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ForwardIRKExport.
Definition at line 533 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::sensitivitiesImplicitSystem | ( | ExportStatementBlock * | block, |
| const ExportIndex & | index1, | ||
| const ExportIndex & | index2, | ||
| const ExportIndex & | index3, | ||
| const ExportIndex & | tmp_index1, | ||
| const ExportIndex & | tmp_index2, | ||
| const ExportVariable & | Ah, | ||
| const ExportVariable & | Bh, | ||
| const ExportVariable & | det, | ||
| bool | STATES, | ||
| uint | number | ||
| ) | [virtual] |
Exports the code needed to compute the sensitivities of the states defined by the nonlinear, fully implicit system.
- Parameters:
-
[in] block The block to which the code will be exported. [in] Ah The variable containing the internal coefficients of the RK method, multiplied with the step size. [in] Bh The variable containing the weights of the RK method, multiplied with the step size. [in] det The variable that holds the determinant of the matrix in the linear system. [in] STATES True if the sensitivities with respect to a state are needed, false otherwise. [in] number This number defines the stage of the state with respect to which the sensitivities are computed.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ForwardIRKExport.
Definition at line 236 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::sensitivitiesOutputSystem | ( | ExportStatementBlock * | block, |
| const ExportIndex & | index1, | ||
| const ExportIndex & | index2, | ||
| const ExportIndex & | index3, | ||
| const ExportIndex & | index4, | ||
| const ExportIndex & | tmp_index1, | ||
| const ExportIndex & | tmp_index2, | ||
| const ExportVariable & | Ah, | ||
| const ExportVariable & | Bh, | ||
| bool | STATES, | ||
| uint | number | ||
| ) | [virtual] |
Exports the code needed to compute the sensitivities of the states, defined by the linear output system.
- Parameters:
-
[in] block The block to which the code will be exported. [in] Ah The variable containing the internal coefficients of the RK method, multiplied with the step size. [in] Bh The variable containing the weights of the RK method, multiplied with the step size. [in] STATES True if the sensitivities with respect to a state are needed, false otherwise. [in] number This number defines the stage of the state with respect to which the sensitivities are computed.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ForwardIRKExport.
Definition at line 421 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::setup | ( | ) | [virtual] |
Initializes export of a tailored integrator.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ForwardIRKExport.
Definition at line 572 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::solveImplicitSystem | ( | ExportStatementBlock * | block, |
| const ExportIndex & | index1, | ||
| const ExportIndex & | index2, | ||
| const ExportIndex & | index3, | ||
| const ExportIndex & | tmp_index, | ||
| const ExportVariable & | Ah, | ||
| const ExportVariable & | C, | ||
| const ExportVariable & | det, | ||
| bool | DERIVATIVES = false |
||
| ) | [virtual] |
Exports the code needed to solve the system of collocation equations for the nonlinear, fully implicit system.
- Parameters:
-
[in] block The block to which the code will be exported. [in] Ah The variable containing the internal coefficients of the RK method, multiplied with the step size. [in] det The variable that holds the determinant of the matrix in the linear system.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 190 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::solveInputSystem | ( | ExportStatementBlock * | block, |
| const ExportIndex & | index1, | ||
| const ExportIndex & | index2, | ||
| const ExportIndex & | index3, | ||
| const ExportIndex & | tmp_index, | ||
| const ExportVariable & | Ah | ||
| ) | [virtual] |
Exports the code needed to solve the system of collocation equations for the linear input system.
- Parameters:
-
[in] block The block to which the code will be exported. [in] A1 A constant matrix defining the equations of the linear input system. [in] B1 A constant matrix defining the equations of the linear input system. [in] Ah The variable containing the internal coefficients of the RK method, multiplied with the step size.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 81 of file dirk_export.cpp.
| returnValue DiagonallyImplicitRKExport::solveOutputSystem | ( | ExportStatementBlock * | block, |
| const ExportIndex & | index1, | ||
| const ExportIndex & | index2, | ||
| const ExportIndex & | index3, | ||
| const ExportIndex & | tmp_index, | ||
| const ExportVariable & | Ah, | ||
| bool | DERIVATIVES = false |
||
| ) | [virtual] |
Exports the code needed to solve the system of collocation equations for the linear output system.
- Parameters:
-
[in] block The block to which the code will be exported. [in] Ah The variable containing the internal coefficients of the RK method, multiplied with the step size. [in] A3 A constant matrix defining the equations of the linear output system.
- Returns:
- SUCCESSFUL_RETURN
Reimplemented from ImplicitRungeKuttaExport.
Definition at line 394 of file dirk_export.cpp.
The documentation for this class was generated from the following files: