#include <ueye_cam_nodelet.hpp>
Public Member Functions | |
| void | configCallback (ueye_cam::UEyeCamConfig &config, uint32_t level) |
| virtual void | onInit () |
| UEyeCamNodelet () | |
| virtual | ~UEyeCamNodelet () |
Static Public Attributes | |
| static const std::string | DEFAULT_CAMERA_NAME = "camera" |
| static const std::string | DEFAULT_CAMERA_TOPIC = "image_raw" |
| static const std::string | DEFAULT_COLOR_MODE = "" |
| static constexpr double | DEFAULT_EXPOSURE = 33.0 |
| static constexpr int | DEFAULT_FLASH_DURATION = 1000 |
| static const std::string | DEFAULT_FRAME_NAME = "camera" |
| static constexpr double | DEFAULT_FRAME_RATE = 10.0 |
| static constexpr int | DEFAULT_IMAGE_HEIGHT = 480 |
| static constexpr int | DEFAULT_IMAGE_WIDTH = 640 |
| static constexpr int | DEFAULT_PIXEL_CLOCK = 25 |
| static constexpr unsigned int | RECONFIGURE_CLOSE = 3 |
| static constexpr unsigned int | RECONFIGURE_RUNNING = 0 |
| static constexpr unsigned int | RECONFIGURE_STOP = 1 |
Protected Member Functions | |
| virtual INT | connectCam () |
| virtual INT | disconnectCam () |
| void | frameGrabLoop () |
| void | loadIntrinsicsFile () |
| INT | parseROSParams (ros::NodeHandle &local_nh) |
| INT | queryCamParams () |
| bool | saveIntrinsicsFile () |
| bool | setCamInfo (sensor_msgs::SetCameraInfo::Request &req, sensor_msgs::SetCameraInfo::Response &rsp) |
| void | startFrameGrabber () |
| void | stopFrameGrabber () |
Protected Attributes | |
| std::string | cam_intr_filename_ |
| ueye_cam::UEyeCamConfig | cam_params_ |
| std::string | cam_params_filename_ |
| std::string | cam_topic_ |
| bool | cfg_sync_requested_ |
| bool | frame_grab_alive_ |
| std::thread | frame_grab_thread_ |
| std::string | frame_name_ |
| sensor_msgs::CameraInfo | ros_cam_info_ |
| image_transport::CameraPublisher | ros_cam_pub_ |
| ReconfigureServer * | ros_cfg_ |
| boost::recursive_mutex | ros_cfg_mutex_ |
| unsigned int | ros_frame_count_ |
| sensor_msgs::Image | ros_image_ |
| ros::ServiceServer | set_cam_info_srv_ |
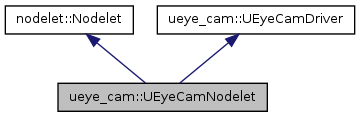
Detailed Description
ROS interface nodelet for UEye camera API from IDS Imaging Development Systems GMBH.
Definition at line 72 of file ueye_cam_nodelet.hpp.
Constructor & Destructor Documentation
Definition at line 73 of file ueye_cam_nodelet.cpp.
| ueye_cam::UEyeCamNodelet::~UEyeCamNodelet | ( | ) | [virtual] |
Definition at line 113 of file ueye_cam_nodelet.cpp.
Member Function Documentation
| void ueye_cam::UEyeCamNodelet::configCallback | ( | ueye_cam::UEyeCamConfig & | config, |
| uint32_t | level | ||
| ) |
Handles callbacks from dynamic_reconfigure.
Definition at line 494 of file ueye_cam_nodelet.cpp.
| INT ueye_cam::UEyeCamNodelet::connectCam | ( | ) | [protected, virtual] |
Initializes the camera handle, loads UEye INI configuration, refreshes parameters from camera, loads and sets static ROS parameters, and starts the frame grabber thread.
Definition at line 855 of file ueye_cam_nodelet.cpp.
| INT ueye_cam::UEyeCamNodelet::disconnectCam | ( | ) | [protected, virtual] |
Stops the frame grabber thread, closes the camera handle, and releases all local variables.
Reimplemented from ueye_cam::UEyeCamDriver.
Definition at line 876 of file ueye_cam_nodelet.cpp.
| void ueye_cam::UEyeCamNodelet::frameGrabLoop | ( | ) | [protected] |
Main ROS interface "spin" loop.
Definition at line 898 of file ueye_cam_nodelet.cpp.
| void ueye_cam::UEyeCamNodelet::loadIntrinsicsFile | ( | ) | [protected] |
Loads the camera's intrinsic parameters from camIntrFilename.
Definition at line 1059 of file ueye_cam_nodelet.cpp.
| void ueye_cam::UEyeCamNodelet::onInit | ( | ) | [virtual] |
Initializes ROS environment, loads static ROS parameters, initializes UEye camera, and starts live capturing / frame grabbing thread.
Implements nodelet::Nodelet.
Definition at line 126 of file ueye_cam_nodelet.cpp.
| INT ueye_cam::UEyeCamNodelet::parseROSParams | ( | ros::NodeHandle & | local_nh | ) | [protected] |
Loads, validates, and updates static ROS parameters.
Definition at line 196 of file ueye_cam_nodelet.cpp.
| INT ueye_cam::UEyeCamNodelet::queryCamParams | ( | ) | [protected] |
Reads parameter values from currently selected camera.
Definition at line 638 of file ueye_cam_nodelet.cpp.
| bool ueye_cam::UEyeCamNodelet::saveIntrinsicsFile | ( | ) | [protected] |
Saves the camera's intrinsic parameters to camIntrFilename.
Definition at line 1071 of file ueye_cam_nodelet.cpp.
| bool ueye_cam::UEyeCamNodelet::setCamInfo | ( | sensor_msgs::SetCameraInfo::Request & | req, |
| sensor_msgs::SetCameraInfo::Response & | rsp | ||
| ) | [protected] |
(ROS Service) Updates the camera's intrinsic parameters over the ROS topic, and saves the parameters to a flatfile.
Definition at line 888 of file ueye_cam_nodelet.cpp.
| void ueye_cam::UEyeCamNodelet::startFrameGrabber | ( | ) | [protected] |
Definition at line 1044 of file ueye_cam_nodelet.cpp.
| void ueye_cam::UEyeCamNodelet::stopFrameGrabber | ( | ) | [protected] |
Definition at line 1050 of file ueye_cam_nodelet.cpp.
Member Data Documentation
std::string ueye_cam::UEyeCamNodelet::cam_intr_filename_ [protected] |
Definition at line 171 of file ueye_cam_nodelet.hpp.
ueye_cam::UEyeCamConfig ueye_cam::UEyeCamNodelet::cam_params_ [protected] |
Definition at line 173 of file ueye_cam_nodelet.hpp.
std::string ueye_cam::UEyeCamNodelet::cam_params_filename_ [protected] |
Definition at line 172 of file ueye_cam_nodelet.hpp.
std::string ueye_cam::UEyeCamNodelet::cam_topic_ [protected] |
Definition at line 170 of file ueye_cam_nodelet.hpp.
bool ueye_cam::UEyeCamNodelet::cfg_sync_requested_ [protected] |
Definition at line 160 of file ueye_cam_nodelet.hpp.
const std::string ueye_cam::UEyeCamNodelet::DEFAULT_CAMERA_NAME = "camera" [static] |
Definition at line 85 of file ueye_cam_nodelet.hpp.
const std::string ueye_cam::UEyeCamNodelet::DEFAULT_CAMERA_TOPIC = "image_raw" [static] |
Definition at line 86 of file ueye_cam_nodelet.hpp.
const std::string ueye_cam::UEyeCamNodelet::DEFAULT_COLOR_MODE = "" [static] |
Definition at line 87 of file ueye_cam_nodelet.hpp.
constexpr double ueye_cam::UEyeCamNodelet::DEFAULT_EXPOSURE = 33.0 [static] |
Definition at line 79 of file ueye_cam_nodelet.hpp.
constexpr int ueye_cam::UEyeCamNodelet::DEFAULT_FLASH_DURATION = 1000 [static] |
Definition at line 82 of file ueye_cam_nodelet.hpp.
const std::string ueye_cam::UEyeCamNodelet::DEFAULT_FRAME_NAME = "camera" [static] |
Definition at line 84 of file ueye_cam_nodelet.hpp.
constexpr double ueye_cam::UEyeCamNodelet::DEFAULT_FRAME_RATE = 10.0 [static] |
Definition at line 80 of file ueye_cam_nodelet.hpp.
constexpr int ueye_cam::UEyeCamNodelet::DEFAULT_IMAGE_HEIGHT = 480 [static] |
Definition at line 78 of file ueye_cam_nodelet.hpp.
constexpr int ueye_cam::UEyeCamNodelet::DEFAULT_IMAGE_WIDTH = 640 [static] |
Definition at line 77 of file ueye_cam_nodelet.hpp.
constexpr int ueye_cam::UEyeCamNodelet::DEFAULT_PIXEL_CLOCK = 25 [static] |
Definition at line 81 of file ueye_cam_nodelet.hpp.
bool ueye_cam::UEyeCamNodelet::frame_grab_alive_ [protected] |
Definition at line 156 of file ueye_cam_nodelet.hpp.
std::thread ueye_cam::UEyeCamNodelet::frame_grab_thread_ [protected] |
Definition at line 155 of file ueye_cam_nodelet.hpp.
std::string ueye_cam::UEyeCamNodelet::frame_name_ [protected] |
Definition at line 169 of file ueye_cam_nodelet.hpp.
constexpr unsigned int ueye_cam::UEyeCamNodelet::RECONFIGURE_CLOSE = 3 [static] |
Definition at line 76 of file ueye_cam_nodelet.hpp.
constexpr unsigned int ueye_cam::UEyeCamNodelet::RECONFIGURE_RUNNING = 0 [static] |
Definition at line 74 of file ueye_cam_nodelet.hpp.
constexpr unsigned int ueye_cam::UEyeCamNodelet::RECONFIGURE_STOP = 1 [static] |
Definition at line 75 of file ueye_cam_nodelet.hpp.
sensor_msgs::CameraInfo ueye_cam::UEyeCamNodelet::ros_cam_info_ [protected] |
Definition at line 164 of file ueye_cam_nodelet.hpp.
Definition at line 162 of file ueye_cam_nodelet.hpp.
ReconfigureServer* ueye_cam::UEyeCamNodelet::ros_cfg_ [protected] |
Definition at line 158 of file ueye_cam_nodelet.hpp.
boost::recursive_mutex ueye_cam::UEyeCamNodelet::ros_cfg_mutex_ [protected] |
Definition at line 159 of file ueye_cam_nodelet.hpp.
unsigned int ueye_cam::UEyeCamNodelet::ros_frame_count_ [protected] |
Definition at line 165 of file ueye_cam_nodelet.hpp.
sensor_msgs::Image ueye_cam::UEyeCamNodelet::ros_image_ [protected] |
Definition at line 163 of file ueye_cam_nodelet.hpp.
Definition at line 167 of file ueye_cam_nodelet.hpp.
The documentation for this class was generated from the following files: