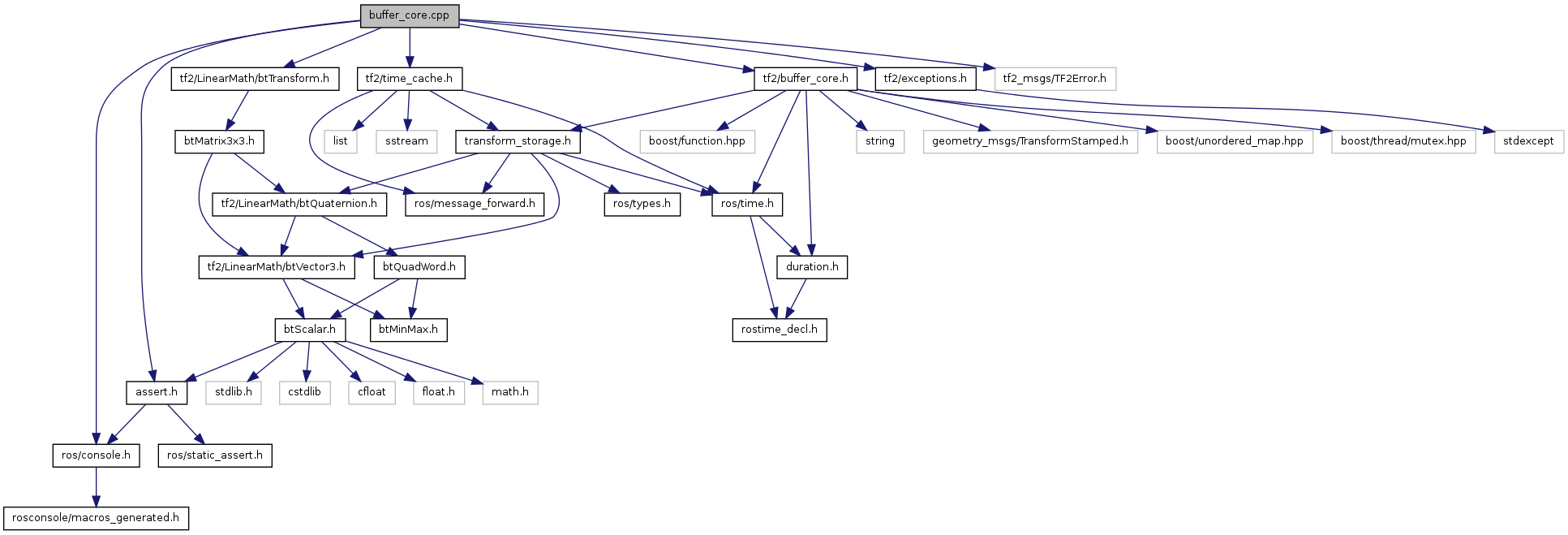
#include "tf2/buffer_core.h"#include "tf2/time_cache.h"#include "tf2/exceptions.h"#include "tf2_msgs/TF2Error.h"#include <ros/assert.h>#include <ros/console.h>#include "tf2/LinearMath/btTransform.h"
Include dependency graph for buffer_core.cpp:
Go to the source code of this file.
Classes | |
| struct | tf2::CanTransformAccum |
| struct | tf2::BufferCore::RemoveRequestByCallback |
| struct | tf2::BufferCore::RemoveRequestByID |
| struct | tf2::TimeAndFrameIDFrameComparator |
| struct | tf2::TransformAccum |
Namespaces | |
| namespace | tf2 |
Enumerations | |
| enum | tf2::WalkEnding { tf2::Identity, tf2::TargetParentOfSource, tf2::SourceParentOfTarget, tf2::FullPath } |
Functions | |
| void | tf2::setIdentity (geometry_msgs::Transform &tx) |
| bool | tf2::startsWithSlash (const std::string &frame_id) |
| std::string | tf2::stripSlash (const std::string &in) |
| void | tf2::transformMsgToTF2 (const geometry_msgs::Transform &msg, btTransform &bt) |
| convert Transform msg to Transform | |
| void | tf2::transformTF2ToMsg (const btTransform &bt, geometry_msgs::Transform &msg) |
| convert Transform to Transform msg | |
| void | tf2::transformTF2ToMsg (const btTransform &bt, geometry_msgs::TransformStamped &msg, ros::Time stamp, const std::string &frame_id, const std::string &child_frame_id) |
| convert Transform to Transform msg | |
| void | tf2::transformTF2ToMsg (const btQuaternion &orient, const btVector3 &pos, geometry_msgs::Transform &msg) |
| void | tf2::transformTF2ToMsg (const btQuaternion &orient, const btVector3 &pos, geometry_msgs::TransformStamped &msg, ros::Time stamp, const std::string &frame_id, const std::string &child_frame_id) |