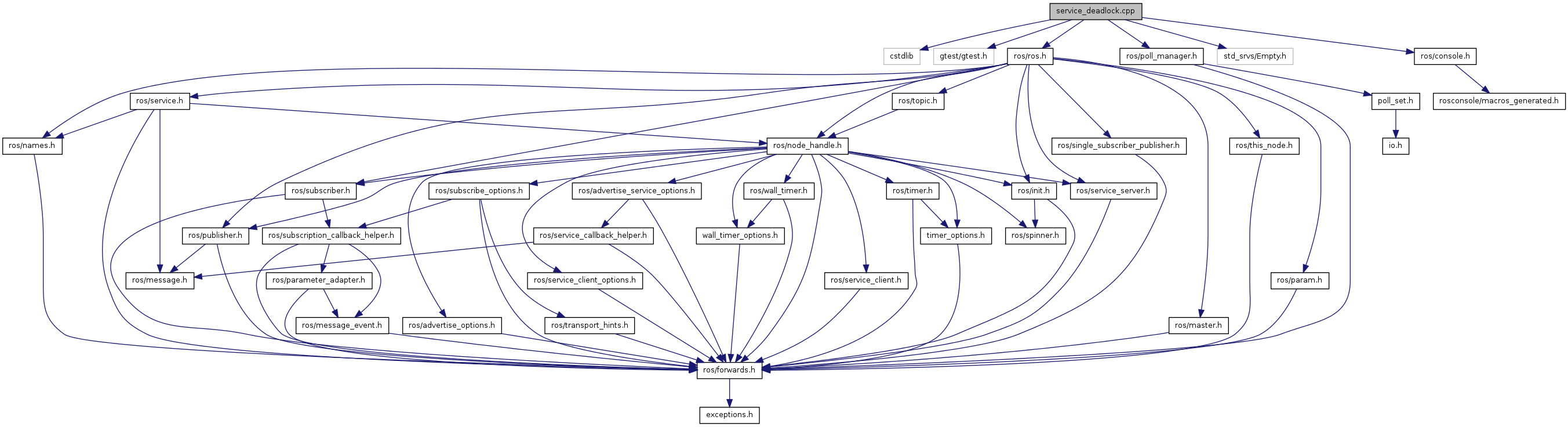
#include <cstdlib>#include <gtest/gtest.h>#include "ros/ros.h"#include "std_srvs/Empty.h"#include <ros/console.h>#include <ros/poll_manager.h>
Include dependency graph for service_deadlock.cpp:
Go to the source code of this file.
Functions | |
| void | call (ros::ServiceClient &client) |
| bool | dummyService (std_srvs::Empty::Request &req, std_srvs::Empty::Request &res) |
| int | main (int argc, char **argv) |
| TEST (roscpp, ServiceDeadlocking) | |
Variables | |
| static const char | SERVICE1 [] = "service1" |
Function Documentation
| void call | ( | ros::ServiceClient & | client | ) |
Definition at line 16 of file service_deadlock.cpp.
| bool dummyService | ( | std_srvs::Empty::Request & | req, |
| std_srvs::Empty::Request & | res | ||
| ) |
Definition at line 9 of file service_deadlock.cpp.
| int main | ( | int | argc, |
| char ** | argv | ||
| ) |
Definition at line 66 of file service_deadlock.cpp.
| TEST | ( | roscpp | , |
| ServiceDeadlocking | |||
| ) |
Definition at line 33 of file service_deadlock.cpp.
Variable Documentation
const char SERVICE1[] = "service1" [static] |
Definition at line 14 of file service_deadlock.cpp.