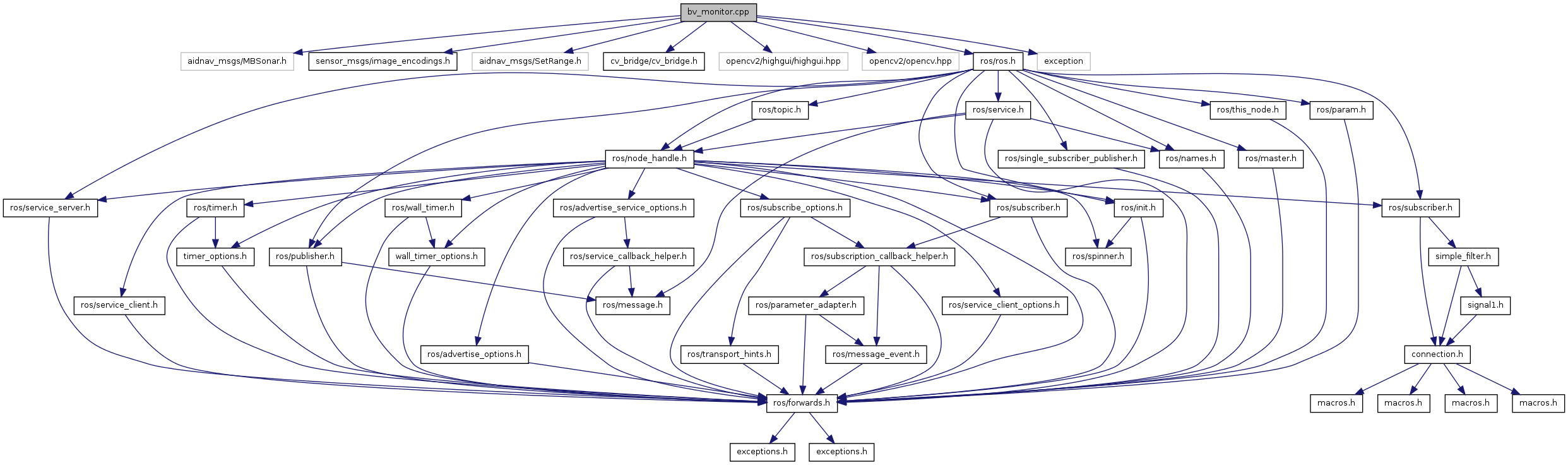
#include <aidnav_msgs/MBSonar.h>#include <sensor_msgs/image_encodings.h>#include <aidnav_msgs/SetRange.h>#include <cv_bridge/cv_bridge.h>#include <opencv2/highgui/highgui.hpp>#include <opencv2/opencv.hpp>#include <ros/ros.h>#include <exception>
Include dependency graph for bv_monitor.cpp:
Go to the source code of this file.
Functions | |
| void | callback (const aidnav_msgs::MBSonarConstPtr &image) |
| void | callback2 (const aidnav_msgs::MBSonarConstPtr &image) |
| cv::Mat | disp (const cv::Mat &img, float max=1024) |
| int | main (int argc, char *argv[]) |
| std::pair< float, float > | noise_estimate (cv::Mat &meanM, cv::Mat &stdM, size_t x, size_t y, int colSpan, int rowSpan) |
| void | normalize (const cv::Mat &frame) |
Variables | |
| ros::Time | last |
Function Documentation
| void callback | ( | const aidnav_msgs::MBSonarConstPtr & | image | ) |
Definition at line 102 of file bv_monitor.cpp.
| void callback2 | ( | const aidnav_msgs::MBSonarConstPtr & | image | ) |
Definition at line 201 of file bv_monitor.cpp.
| cv::Mat disp | ( | const cv::Mat & | img, |
| float | max = 1024 |
||
| ) |
Definition at line 47 of file bv_monitor.cpp.
| int main | ( | int | argc, |
| char * | argv[] | ||
| ) |
Definition at line 231 of file bv_monitor.cpp.
| std::pair<float, float> noise_estimate | ( | cv::Mat & | meanM, |
| cv::Mat & | stdM, | ||
| size_t | x, | ||
| size_t | y, | ||
| int | colSpan, | ||
| int | rowSpan | ||
| ) |
Definition at line 72 of file bv_monitor.cpp.
| void normalize | ( | const cv::Mat & | frame | ) |
Definition at line 54 of file bv_monitor.cpp.
Variable Documentation
Definition at line 45 of file bv_monitor.cpp.